Eléments de dimensionnement des alimentations à découpage

Cours en ligne sur le site web : www.mecatronique.bretagne.ens-cachan.fr 1
Eléments de dimensionnement
des alimentations à découpage
forward et flyback
(incluant l’écrêteur RCD)
Document exploité en préparation à l’agrégation de Génie Electrique
Bernard MULTON
ENS de Cachan – Antenne de Bretagne
© Ecole Normale Supérieure de Cachan, février 2006
ISBN : 2-9099968-73-1

Cours en ligne sur le site web : www.mecatronique.bretagne.ens-cachan.fr 2
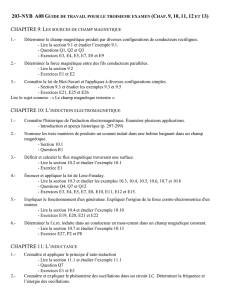
Alimentation forward (mono-interrupteur et à une seule sortie)
Schéma
Le cahier des charges spécifie V
I
, V0 et
I
0 plus l’ondulation
∆
V0 de la tension de sortie
Les composants à pré-dimensionner sont :
-les semi-conducteurs de puissance : T (supposé MOS), D1, D2 et D3
-les composants passifs : Transformateur, Inductance, Condensateur de sortie
(le condensateur d’entrée n’est pas traité, se référer au cours « alimentations à découpage »)
1. Principaux semi-conducteurs de puissance
Au point nominal, on choisit (puisque n1=n3)
α
≅
0, 45
afin de conserver une petite marge de réglage vers
α
≅
0,5
La puissance vue de l’entrée vaut : I01 VImP
⋅
⋅
⋅α≅
en prenant arbitrairement (selon le savoir-faire acquis)
une valeur du rendement η, on peut réduire les
itérations de la procédure.
P1=
P
0
η
Alors le courant moyen de sortie ramené au primaire vaut : mI0=
P
1
η
⋅
α
⋅V
I
Donc, en négligeant les effets du courant magnétisant et de l’ondulation du courant dans l’inductance de
lissage (au secondaire), la valeur efficace (dimensionnante dans le cas d’un MOS) du courant dans le
transistor vaut : ITrms ≅
α
⋅mI0
La tension maximale aux bornes du transistor vaut : VTMax
≅
2
⋅
V
I
une marge de sécurité, dépendant de l’application doit être prise, par exemple si
2V
I
=100V
BV
=150V
Transformateur
à 3 enroulements

Cours en ligne sur le site web : www.mecatronique.bretagne.ens-cachan.fr 3
Diodes : en première approximation, les diodes sont dimensionnées en courant moyen
I
D1≅
α
⋅
I
0
ID2≅1−
α
()
⋅I0
Tenue en tension : IDMax mVV =+ marge de sécurité.
Remarque : Pour aller plus loin dans le dimensionnement, les calculs de toutes les pertes doivent être
considérés, notamment celles de commutation.
2. Composants passifs
Transformateur : P1≅kb
2
α
BM⋅f⋅J⋅AeAw
(voir polycopié « Composants Passifs de l’électronique de puissance » également téléchargeable)
Choix de J, f et
B
M
:
Il s’agit principalement un problème d’échauffement.
J (densité de courant) est associée à la densité volumique des
pertes Joule :
ρ
J2 (en W/m3)
M
B.f correspond à la densité volumique de pertes magnétiques
(malheureusement sans formulation directe)
Les densités des pertes acceptables dépendent des dimensions, les effets d’échelle sont tels qu’elles
augmentent lorsque les dimensions diminuent.
Ex 2
mm/A10J ≅ pour une taille de qq cm (ex : pot RM8 ou 10)
3
Fe dm/W300≅ρ pour des dimensions similaires
Notons que la densité de pertes admissible diminue lorsque les dimensions croissent, à échauffement
donné.
La fréquence est choisie sur des considérations globales (semi-conducteurs, composants passifs,
comptabilité électromagnétique)
Le matériau magnétique doit être choisi en fonction de f (voir
cours « Composants passifs »)
Par exemple avec des matériaux économiques (types S7,
B51…)
à 100kHz et 300
W
/
dm3 :
le produit
B
M
⋅
f
vaut environ : 10 000 à 20 000 Hz.T
soit
B
M
=0,1 à 0,2 T (en alternatif sinusoïdal), et donc
B
M
=0,2 à 0,4 T (en triangle unidirectionnel)
Bien sûr BM doit être inférieur à Bsat (de l’ordre de 0,3T à chaud)
Alors : AeAw≥
P
1
kb
2
α
⋅BMf⋅J
La valeur de kb dépend de la qualité de bobinage, des isolants éventuellement ajoutés et des valeurs de fils
émaillés réellement disponibles…
Par exemple : 4,0k b≅
à pFe (W/m3) = Cte

Cours en ligne sur le site web : www.mecatronique.bretagne.ens-cachan.fr 4
Une fois le circuit magnétique sélectionné via son produit Ae.Aw, et dans les produits disponibles (sur
catalogue), on dispose des caractéristiques magnétiques du noyau :
Ae, Aw, lw (longueur moyenne d’une spire), AL (perméance)…
On notera cependant que le produit des aires ne fait pas partie des données directement accessibles (un
tableau est proposé dans le cours « Composants passifs »).
Calcul de n1 et n2
φ
M
=V
I
⋅
α
T
et T.VA.B.n IeM1
α
=
eM
I
1A.B
T.V
n
α
≅
Pour n2, il est nécessaire de connaître le rapport de transformation m :
Or, en conduction continue : V0=
α
⋅mV
I
−
∆
V
Où ∆V correspond à l’ensemble des chutes de tension (semi-conducteurs, résistances des bobinages,
empiètement…).
Si les semi-conducteurs ont été préalablement choisis (compte tenu du prédimensionnement précédent),
leurs chutes de tension peuvent être évaluées à partir de leurs caractéristiques. Celles des bobinages
peuvent également l’être par calcul des résistances (via la section des conducteurs, voir ci-dessous et la
longueur moyenne des spires).
m=n2
n1
=V0+
∆
V
α
V
I
Diamètre des conducteurs
Diamètre théorique S1=
I
1rms
J
=
I
Krms
J
∅1=4
π
S1
S2=
I
2rms
J
I2rms ≅
α
I0 ∅2=4
π
S2
Pour minimiser les pertes par courants induits (effets de proximité), il est préférable de choisir des
diamètres de fil inférieurs à p
e2 ⋅ où ep est l’épaisseur de peau
ep=
ρ
π
⋅
µ
⋅f
ρ
≈2⋅10−8Ω⋅m à 100kHz : ep
≅
0,2mm
µ
=
µ
0=4
π
⋅10
−
7
Les conducteurs sont donc éventuellement fractionnés. Mais il faut savoir que l’effet de ce fractionnement
n’est valable que s’ils sont torsadés (et bien sûr isolés), comme dans les fils de Litz. La simple mise en
parallèle a des performances moindres.
Caractéristiques électriques
L
µ
=n12⋅AL i
µ
M=VI
⋅
α
T
L
µ
=I3M
I3rms ≅
α
3I3M
Détermination de l’inductance de fuite équivalent ramenée au
secondaire (l2eq) : voir cours « Composants passifs ». Elle peut être mesurée par un essai en court-circuit à
fréquence élevée (voisine de la fréquence de fonctionnement), par exemple au pont d’impédance.

Cours en ligne sur le site web : www.mecatronique.bretagne.ens-cachan.fr 5
Les résistances des enroulements peuvent être évaluées par :
1fil
w
11 S
l
nR ρ≅
2fil
w
22 S
l
nR ρ≅
(Mesurables au pont ou avec une méthode voltampèremétrique)
Inductance de lissage
WM=1
2LI
LM 2
L=mVI
α
1−
α
()
∆iL⋅f il faut donc choisir l’ondulation de courant
∆
iL
Sa valeur ∆iL résulte d’un optimum technico-économique surtout centré sur le couple condensateur de
sortie - inductance.
Une valeur de 50% de
I
0 est courante, ce qui a pour conséquence de donner des fonctionnements en
régime de conduction discontinue dès que le courant de sortie descend en dessous du quart du courant
nominal (la moitié de ∆iL).
Ex si ∆iL≅0,5
I
0
Alors :
I
LM ≅1, 2 5
I
0
Présélection du circuit magnétique, choix du produit des aires AeAw… voir cours « Composants
passifs » (+choix de
B
M
, J, kb)
Entrefer :
On suppose que toute l’énergie magnétique est stockée dans l’entrefer : WM≅1
2
BM2
µ
0
e⋅Ae
Attention e = entrefer total magnétique
Si les 2 ½ circuits magnétiques sont totalement séparés par le même entrefer mécanique : e = méca
e2
⋅
Bobinage
En négligeant la circulation du champ dans le fer devant celle de l’entrefer, la perméance s’exprime par :
AL≅
µ
0
A
e
e
Alors : n=L
AL
et Sfil =
I
eff
J
Condensateur de sortie
Tenue en tension U
C
≥V0
avec marge de sécurité compte-tenu de la régulation.
Sur la base de l’ondulation capacitive C≥
∆
iL
8∆V0⋅f
ce qui donne une valeur minimale de C.
Ensuite il faut choisir un condensateur de puissance de capacité supérieure ou égale à C et de résistance
équivalente série ESR <
∆
V0
∆iL (ce qui conduit généralement, dans le cas des technologies électrolytiques
usuelles à une valeur de C bien supérieure à celle initialement déterminée), et supportant un courant
efficace, à la fréquence de découpage, de : Iceff =
∆
i2
12 .
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%