Les différents types de mouvements

Lesdifférentstypesde
Les
différents
types
de
mouvements
Réflexes, automatiques et
Réflexes,
automatiques
et
intentionnels
François POTDEVIN – FSSEP Université Lille 2

Références utilisées
Références
utilisées

Rappels
Rappels
Défi iti d l ti é d ( di ti )
•
Défi
n
iti
on
d
es musc
l
es ac
ti
v
é
s, or
d
re
(
coor
di
na
ti
on
)
,
temps, intensité
•
793 muscles, 4 à 4000 unités motrices, ingérable au
793
muscles,
4
à
4000
unités
motrices,
ingérable
au
niveau conscient:
‐de nombreux interneurones, commandes non directes
‐cortex moteur primaire (aire 4), de là partent
principalement les voies classiques
le cervelet
‐
le
cervelet
.
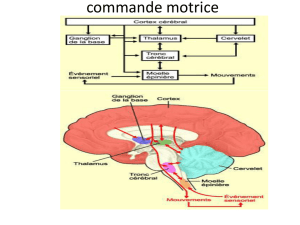
Niveau de la coordination musculaire pour atteindre
l’objecti
f

Lesdifférentstypes
Les
différents
types
•Actifs versus passifs
•
Réflexes , automatiques, intentionnels
Réflexes
,
automatiques,
intentionnels
•Déclenchés par un stimulus versus auto‐initiés

Les mouvements réflexes
Les
mouvements
réflexes
éfi i i
li f i l i l
•D
éfi
n
i
t
i
on «
li
en
f
onct
i
onne
l
entre st
i
mu
l
us et
réponse motrice »
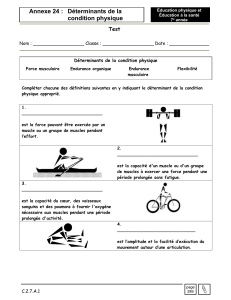
•Arc réflexe constitué organe récepteur
(
cutané
,
musculaire
,
viscéral
),
voie sensitive
(, , ),
afférente (nerf cutané, musculaire, viscéral,
racine rachidienne dorsale
,
nerf crânien
),
,),
effecteur (muscle strié, lisse, glande
endocrine, glande exocrine)
endocrine,
glande
exocrine)
•Réflexe palpébral, tendineux, flexion,…
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
1
/
63
100%