Comprendre la plaque signalétique d'un moteur électrique


Introduction
De nos jours, presque tous les processus industriels sont en
mouvement grâce à des moteurs électriques.
Ceux-ci sont normalisés pour permettre l’interchangeabilité entre
les divers fabricants.
D’où l’importance de bien comprendre tous les éléments
retrouvés sur la plaque signalétique.
Dans cette présentation, nous prendrons une plaque signalétique
d’un moteur triphasé, car ils sont les plus communs en industrie.
©Pierre Blouin – www.electromecanique.info - 2012

La plaque signalétique
J’ai choisi cette plaque, car elle contient toutes les informations
que nous devons apprendre à connaitre.
De plus, comme ce n’est pas un fabricant américain, on ne
pourra pas me reprocher de faire de la publicité pour un de
ceux-ci ;-)
©Pierre Blouin – www.electromecanique.info - 2012

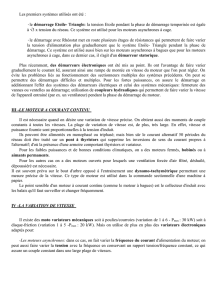
On commence avec les normes…
La fabrication des moteurs électriques est régie par différentes normes qui établissent les
paramètres de construction tels que les caractéristiques électriques, les dimensions et le
matériel à utiliser.
NEMA : National Electrical Manufacturers Association (Américaine)
EEMAC : Association des Manufacturiers électriques et Électronique du Canada
CSA : Canadian Standard Association
CEI : Commission électrotechnique internationale (IEC en anglais, européenne)
IEEE : Institute of Electrical and Electronic Engineers (européenne)
Ici, ce moteur est approuvé par la CSA.
©Pierre Blouin – www.electromecanique.info - 2012

La puissance du moteur
La puissance du moteur est indiquée en HP ou en KW.
C’est la puissance que celui-ci développe quand il a
atteint sa vitesse maximale.
Donc, quand il a atteint sa vitesse maximale il a un
torque de :
Donc
livres-pied
©Pierre Blouin – www.electromecanique.info - 2012
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%