La generatrice asynchrone a double alimentation

1
1
La génératrice asynchrone
à double alimentation
(Modélisation et commande)
Laboratoire d’Electrotechnique et d’Electronique de Puissance : L2EP
Bruno FRANCOIS
Master (Recherche) Sciences et Technologies
Mention : « Automatique et Systèmes Electriques
Spécialité : Energie Électrique et Développement Durable (E2D2)
2
Modélisation d’une génératrice éolienne
àbase de
machine asynchrone à double alimentation
Technologie étudiée
Grandeurs d’état
Modélisation dynamique
Modèle du système
Zone de fonctionnement
Stratégie de commande
Architecture du dispositif de commande
Architecture du dispositif de commande

2
3
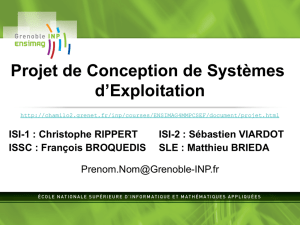
Technologie étudiée
Rt
β
Gearbox D.F.I.G.
Ω
mec
Ω
turbin e Cg
Caer
v
C
im_mac im-res
u
Convert.
PWM 1 Lt
Grid
Bagues
AC 50 Hz
AC variable frequency
Convert.
PWM 2
it1
it2
AC
DC AC
DC
Doubly Fed Induction Generator
Additionnal advantages :
- Rated power of power electronic converters = 30% of the total rated power
- Economical interest
Contrôle de la vitesse et du flux
Contrôle de la puissance
Contrôle des courants « réseau »
Contrôle du bus continu et de la
puissance réactive échangée
4
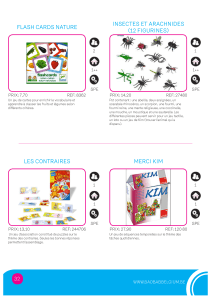
Doubly Fed
Induction Generator
v
Slip
ring
Rotor side
converter
AC 50 Hz
AC variable frequency
Grid side
converter
Grid
Gearbox
Turbine
β
Power monitoring
-Starting
-MPPT
-Pitch control
u
Qsref
Ω
ref
Generator controler Grid connexion controler
ure
f
Qref
It
Is u
Ω
Ir Ug
Control System

3
5
Grandeurs d’état
Équations du système:
Équations de la MADA
isd,isq,ird,irq : courants au stator et au rotor
Repère de travail : Repère de Park 2 axes « d,q »
Équation mécanique
Ω
: Vitesse de l’arbre de la machine
Équations des filtres (liaison rotorique) :
itd , itq , : Courants dans le filtre 2 variables d’état
9Au total 8variables d’état
1 variable d’état
Équations du bus continu :
u : Tension aux bornes du condensateur
4 variables d’état
1 variable d’état
6
Mod
Modé
élisation dynamique
lisation dynamique
Osa
O
sb
O
sc
isa
i
sb
i
sc
vsa
v
sb
v
sc
α
O
→
→
→
Ora
→
O
rb
→
O
rc
→
+
=
sc
sb
sa
sc
sb
sa
s
s
s
sc
sb
sa
dt
d
i
i
i
R
R
R
v
v
v
φ
φ
φ
00 00 00
Équations au stator
Repère naturel (a, b, c)

4
7
+
=
rc
rb
ra
rc
rb
ra
r
r
r
rc
rb
ra
dt
d
i
i
i
R
R
R
v
v
v
φ
φ
φ
00 00 00
+
=
sc
sb
sa
sc
sb
sa
s
s
s
sc
sb
sa
dt
d
i
i
i
R
R
R
v
v
v
φ
φ
φ
00 00 00
Équations au stator
Équations au rotor
Mod
Modé
élisation dynamique
lisation dynamique
Repère naturel (a, b, c)
θ
O
O
sb
O
sc Osa
O
rb
O
rc
Ora
i
rb
i
sb
i
sc
i
s
a
v
sb
v
sc
vsa
→
→ → →
→
v
rb
v
rc
irc
→
ira
vra
8
Mod
Modé
élisation dynamique
lisation dynamique
Repère naturel (a, b, c)
24
cos( ) cos( ) cos( )
33
sa s sa s sb s sc sr ra rb rc
=l i M i +M i +M i +i +i
π
π
φθθθ
+−−
En l’absence de saturation, les flux sont supposés linéairement dépendants des
courants.
Six enroulements magnétiquement couplés, dont trois sont mobiles.
Le flux total dans chaque enroulement est donné par la somme de :
_ son flux propre (lié par l’inductance pour un flux statorique),
_ des deux flux de couplage au niveau du stator (liés par les mutuelles inductances
pour un flux statorique)
_ des trois flux de couplage avec le rotor (liés par des mutuelles inductances variables
selon la position du rotor).

5
9
[] [ ]
()
sa s s s sa ra
s sb s s s sb sr rb
sc s s s sc rc
s
tator
lMM i i
= = M l M i + M R i
MM l i i
φ
φφ θ
φ
[]
42
cos( ) cos( ) cos( )
33
24
() = cos( ) cos() cos( )
33
42
cos( ) cos( ) cos( )
33
R
θ
θπ θπ
θθπ θ θπ
θπ θπ θ
−−
−−
−−
10
+
=
rc
rb
ra
rc
rb
ra
r
r
r
rc
rb
ra
dt
d
i
i
i
R
R
R
v
v
v
φ
φ
φ
00 00 00
+
=
sc
sb
sa
sc
sb
sa
s
s
s
sc
sb
sa
dt
d
i
i
i
R
R
R
v
v
v
φ
φ
φ
00 00 00
Équations au stator
Équations au rotor
Mod
Modé
élisation dynamique
lisation dynamique
Repère naturel (a, b, c)
θ
O
O
sb
O
sc Osa
O
rb
Orc
O
ra
i
rb
i
sb
i
sc
i
s
a
v
sb
v
sc
v
sa
→
→ →→
→
vrb
v
rc
i
rc
→
i
ra
v
ra
La matrice inductance dépend de l’angle α
[] [ ]
()
sa s s s sa ra
s sb s s s sb sr rb
sc s s s sc rc
lMM i i
= = M l M i + M R i
M
Ml i i
φ
φφ θ
φ
[]
42
cos( ) cos( ) cos( )
33
24
( ) = cos( ) cos( ) cos( )
33
42
cos( ) cos( ) cos( )
33
R
θ
θπ θπ
θθπ θ θπ
θπ θπ θ
−−
−−
−−
Équations des flux
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%