énoncé

Spé y 2006-2007 page 1/4 Devoir n°6
Spé y 2006-2007 Devoir n°6
CONVERSION DE PUISSANCE
Partie I
PRINCIPE DU MOTEUR ASYNCHRONE
Aucune connaissance préalable du moteur asynchrone n'est nécessaire pour l'étude de cette partie.
Un moteur asynchrone est constitué d'un stator et d'un rotor. Les deux questions suivantes étudient
l’un puis l’autre.
1) Stator de la machine asynchrone : production d'un champ tournant
Le stator est réalisé à l'aide d'un ensemble de bobines fixes destinées à engendrer dans une zone li-
mitée de l'espace un champ magnétique tournant
r
B
(t).
Soit un ensemble de trois bobines, dont les axes sont ré-
gulièrement décalés de
2
3
p
dans le plan xOy, et alimentées par un
système triphasé de courants de pulsation wS dont les intensités
sont les suivantes:
i t I t
i t I t
i t I t
0
1
2
2
3
4
3
( ) cos( )
( ) cos
( ) cos
=
= -
F
H
GI
K
J
= -
F
H
GI
K
J
R
S
|
|
|
T
|
|
|
M S
M S
M S
w
wp
wp
.
La fréquence d'alimentation de ces bobinages statoriques
est égale à 50Hz.
Chaque bobine crée au centre O un champ magnétique qui peut se mettre sous la forme
r
B
j(t) = K.ij(t)
r
e
j (K est une constante et
r
e
j est le vecteur unitaire de l'axe de la jème bobine).
a) Déterminer les composantes sur Ox et Oy du champ magnétique total
r
B
(t) en O. On note-
ra B = ||
r
B
(t)|| sa norme que l'on exprimera en fonction de K et IM.
b) Justifier l'appellation de champ tournant pour ce champ magnétique total
r
B
(t). Préciser à
quelle vitesse angulaire ce champ tourne dans le plan xOy. Calculer la valeur numérique de la vitesse de ro-
tation du champ tournant nS en tours par minute (tr/mn).
c) Soit un ensemble de p (p ³ 3) vecteurs unitaires
r
e
j (0 £ j < p) du plan xOy , tels que
r
e
0 =
r
e
X, et pour j > 0, r r
e e p
j j( ) ,
-=
1
2
d
i
p
. On note
r
e
d(t) le vecteur unitaire tournant à la vitesse Ω coïncidant
avec
r
e
X à t = 0 :
r
e
d(t) = cos(Wt)
r
e
X + sin(Wt)
r
e
Y.
Le théorème de Ferraris (que l’on ne demande pas de démontrer) énonce que
cos cos ( )W Wt k pe t k pepe t
k
p
k
p
-
F
H
G
I
K
J= -
F
H
G
I
K
J=
=
-
=
-
å å
2
2
0
1
0
1
p p
r r r
k k d .
Vérifier ce théorème dans le cas étudié en 1-a.
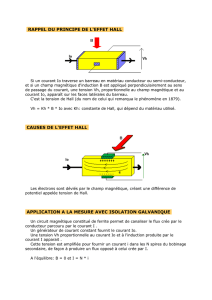
2) Entraînement du rotor de la machine asynchrone
Une machine est constituée en plaçant une «cage d’écureuil» (figure 2-a), le rotor, entre les bobines
fixes de la question I-1-b dans une zone où
r
B
(t) sera supposé uniforme. Le rotor est en rotation autour de
l’axe à la vitesse
r
r
w
w
=
e
Z
(w est légèrement inférieur à wS). Cette cage sera considérée comme équivalente à
n spires conductrices non jointives (n = 4 sur la figure 2-b). À t = 0, Ox et Ox’ (lié au rotor) coïncident. La
spire (0, 0’) est dans le plan vertical, orientée par
r
e
0’(t) =
r
e
X’(t).
De façon générale, la spire (k, k’) est orientée par le vecteur
r
e
k’(t) unitaire normal au plan contenant
la spire et tel que
r
e
k’(t).
r
e
Y’ ³ 0. L et R représentent l’inductance et la résistance d’une spire, S sa surface. On

Spé y 2006-2007 page 2/4 Devoir n°6
prendra l’inductance mutuelle entre les spires du rotor nulle pour simplifier. Enfin on pose wr = wS – w et
l’on se place dans le référentiel du rotor.
a) À quelle vitesse la spire (0, 0’) « voit-
elle » le champ
r
B
(t) tourner ?
b) Montrer qu’elle est parcourue par un
courant de pulsation wr dont on donnera l’amplitude com-
plexe I0 en fonction de K, IM, R, L, wr et S.
c) En déduire sans calcul, pour la spire
(k, k’) l’expression de Ik en fonction de I0, k et n.
Dans toute la suite, on pose
r
r
M I Se
k
k
k
=
'
,
a
n
L
KS=
3
4
et y = arg(R + jLwr).
d) Exprimer
r
M t
k
( ) en notation réelle, en
introduisant |I0| et en posant t t'
/
= -
+
p
y
w
2
r
.
e) En déduire soigneusement que le rotor se comporte comme un dipôle magnétique de mo-
ment
r
M t( ), tournant à la même vitesse que
r
B
(t), en retard sur
r
B
(t) de
p
y
2
+, et que
r
M t aI S( ) sin( )=My. Quelle est la dimension de a ?
3) Couple
a) Mettre l’expression du couple exercé par le stator sur le rotor sous la forme
G = k[IMcos(y)][IMsin(y)], en précisant l’expression de k en fonction de a, n et L.
b) On rappelle que pour une machine à courant continu, on peut écrire
G’ = k’IINDUCTEURIINDUIT. Identifier, en le justifiant, IINDUCTEUR et IINDUIT.
4) Puissance
Les seules pertes considérées sont les pertes par effet Joule au rotor.
a) Exprimer la puissance PM = Gw disponible sur l’arbre en fonction de k, w, IM et y.
b) Exprimer la puissance PJ dissipée dans le rotor en fonction de k, wr, IM et y.
c) On note P la puissance totale absorbée par la machine. Montrer que P = GwS.
d) La tension d’alimentation aux bornes de la bobine k du stator est sinusoïdale, de pulsation
w0 et d’amplitude complexe
U
t U e
j t k
k
S
( ) =- +
F
H
G
I
K
J
0
2
3
wpq. L’avance q de la tension sur le courant est la même
pour toutes les bobines. Exprimer P en fonction de IM, U0 et q.
e) Déterminer l'expression du rendement en fonction de w et wS.
Application numérique : calculer la valeur du rendement si le glissement g=
-
=
w
w
w
w
w
S
S
r
S
est égal
à g = 0,05.
Partie II
ONDULEUR AUTONOME MONOPHASE
En traction ferroviaire, les motrices utilisant un moteur asynchrone sont parfois alimentés par un ca-
ténaire parcouru par un courant continu (tramway, TGV en zone urbaine). Un convertisseur continu/alternatif
est donc nécessaire pour alimenter les bobines du stator.
1) On envisage le fonctionnement d’un convertisseur tension-courant à 4 interrupteurs dont le sché-
ma est le suivant (figure 3):
a) Compte tenu de la nature de la source et de la charge,
quelles sont les contraintes d’ouverture et de fermeture sur les interrup-
teurs ?
b) La séquence de commande sur une période de durée T
est la suivante:
E
i
i1
i2
I
0
uC
K
1
K
2
K
4
K
3
Figure 3

Spé y 2006-2007 page 3/4 Devoir n°6
phase a: 0 £ t £ a T, K1 et K3 fermés, K2 et K4 ouverts;
phase b: a T £ t £ T, K1 et K3 ouverts, K2 et K4 fermés.
Pour une valeur de rapport cyclique a = 0,3, représenter les évolutions temporelles de uC, i, i1 et i2 sur une
période.
c) Pour une valeur quelconque de a, exprimer la valeur moyenne de la tension uC aux bornes de
la source de sortie et de l’intensité i du courant débité par la source d’entrée.
c) En déduire la puissance moyenne échangée par ces sources et tracer le graphe de son évolution
en fonction de a.
2) Une bobine du stator du moteur asynchrone peut être modélisée par l’association série d’une bobine de
coefficient d’auto induction L et d’une résistance R. La séquence de com-
mande des interrupteurs est celle définie à la question 1-b avec a = 0,5.
a) On désigne par –I la valeur du courant iC au début d’un
période. Déterminer l’expression de I en fonction de E, R et th(b) où
b =
RT
L
4
.
b) Quelle est l’expression de la valeur moyenne P de la
puissance délivrée à la charge en fonction de <iC
2>, que l’on ne cherchera
pas à exprimer.
Partie III
CAPTEUR DE COURANT A EFFET HALL
Pour contrôler le couple exercé par le moteur et commander sa vitesse de rotation, il est nécessaire de modifier la
commande des interrupteurs de l’onduleur en fonction des courants mesurés dans les bobines du stator. On étudie ici un cap-
teur de courant délivrant une tension proportionnelle à l’intensité mesurée, qui peut alors être utilisée dans une boucle de ré-
troaction.
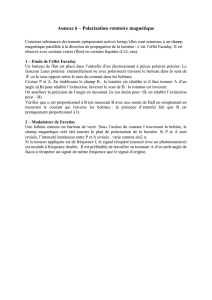
1) Étude de l'effet Hall
On considère une plaque rectangulaire d'épaisseur h et de largeur L (figure 5).
La plaque est parcourue par un courant d'intensité
I uniformément réparti sur la section de la plaque et de
densité de courant volumique
r
J
= J
r
e
X.
La conduction électrique est assurée par des por-
teurs mobiles identiques, de charge q, de nombre par unité
de volume noté n.
La plaque est placée dans un champ magnétique
uniforme
r
B
= B
r
e
Z créé par des sources extérieures. On
néglige le champ magnétique créé par le courant I dans la
plaque devant
r
B
.
a) Exprimer le vecteur vitesse
r
v
des
porteurs de charge dans la plaque en fonction de
r
J
, n et q.
b) Montrer qu'il existe en régime permanent un champ électrique, perpendiculaire à Ox, appelé champ
électrique de Hall
r
E
H. Exprimer les composantes de
r
E
H.
c) Déterminer, en régime permanent, la valeur de la différence de potentiel transversale VH = V(A1) –
V(A2) où A1 et A2 sont deux points de même abscisse x et d'ordonnées respectives y
L
A1
2
= - et y
L
A2
2
=. Montrer
que VH , tension de Hall, peut s'écrire
V
C
h
IB
H
H
=. Expliciter la constante CH.
d) Pour un sens de courant et de champ magnétique donnés, quelle information concernant le phé-
nomène de conduction apporte le signe de la tension de Hall VH ?
2) Capteur de courant à boucle ouverte
Une sonde à effet Hall, d'épaisseur h, est insérée dans l'entrefer d'un circuit magnétique torique
d'épaisseur pratiquement égale à e et de section S, voir figure 6 ci-dessous.
Figure 5
E
i
i1
i2
iC
uC
K
1
K
2
K
4
K
3
R L
Figure 4

Spé y 2006-2007 page 4/4 Devoir n°6
Dans toute cette question, l'épaisseur de la sonde vaut h = 1,5 mm et la section de l'entrefer vaut
S = 1 cm2 et son épaisseur e.
Le matériau dont est constituée la sonde a une constante de Hall CH = 4´10−4 m3.C–1.
La sonde à effet Hall est parcoure par un courant d'intensité constante I = 100 mA.
Le courant à mesurer IP constant traverse le plan xOz du circuit magnétique torique au centre de celui-ci.
Il produit un champ magnétique
r
B
dont les lignes de champ sont canalisées dans le circuit magnétique. On admet
que le champ magnétique dans l'entrefer est uniforme, de direction parallèle à Oz, et a sensiblement pour valeur
r
r
B
I
h
e=
m
0 P
Z.
a) À l'aide du résultat de la question
III-1-c. montrer que la tension de Hall VH peut
s'écrire : VH = K.I.IP. Expliciter la constante K.
b) Pour m0 = 4p´10–7 H.m–1, cal-
culer la valeur numérique de K. Calculer VH pour un
courant IP = 500 A.
c) Pour amplifier la tension VH, on utilise
un montage à A.O. supposé idéal. Exprimer la tension vS
en fonction de VH , R1 et R2.
d) On souhaite obtenir une tension de sortie
vS = kS.IP avec kS = 10 mV.A–1. Proposer des valeurs
pratiques pour les résistances R1 et R2.
3) Capteur de courant à boucle fermée
Ce type de capteur de courant à effet Hall utilise
un bobinage secondaire autour du tore, composé de NS
spires et parcouru par un courant d'intensité iS (voir figure 7).
Ce courant iS est fourni par un « amplificateur de puis-
sance » dont la tension de sortie vérifie la relation vS = A.VH
(avec A > 0).
Le bobinage secondaire a une résistance R et une in-
ductance propre L.
La tension de sortie du capteur de courant vC, est pré-
levée aux bornes de la résistance RC.
On admet que le champ BS dans l'entrefer est uniforme
et de direction parallèle à Oz.
a) On se place en régime variable pour
le courant à mesurer iP(t). On note BM(t), HM(t) (resp.
HS(t), BS(t)) les valeurs algébriques des champs et exci-
tations magnétiques dans le matériau magnétique (resp.
dans l’entrefer).
Justifier que BM(t) = BS(t) [que l’on note B(t)] et
trouver l’expression de B en fonction de m0, e, IP, iS, NS, lT et mrT (périmètre moyen et perméabilité relative du
matériau ferromagnétique constituant le tore). Simplifier cette expression dans le cas où mrT est très élevée (ce que
l’on supposera dans la suite).
b) On suppose que IP = 0 et que l'énergie magnétique, associée à B, est localisée principalement
dans l'entrefer. Donner l'expression de l'énergie magnétique stockée dans l'entrefer WMAG due au bobinage se-
condaire et en déduire la valeur de l'inductance propre L du bobinage secondaire.
Calculer sa valeur numérique pour NS = 100 spires en supposant que l’épaisseur e de l’entrefer est prati-
quement égale à l’épaisseur de la sonde de Hall h.
c) On ne suppose plus que le courant IP est nul . Établir l'équation différentielle régissant l'inten-
sité iS(t) et la mettre sous la forme t a
di
t
dt
i t i t
S
S S
(
)
( ) . ( )+ = .
Exprimer t et a en fonction de m0 et des éléments L, R, RC, A, CH, h, I et NS de ce capteur de courant.
d) Pour R = 100 W, RC = 10 W et A = 1000 , calculer les valeurs numériques de t et a.
e) En déduire l’expression de la tension de sortie du capteur en régime établi constant. Conclure
sur le rôle de ce capteur.
Figure 6
figure 7
1
/
4
100%