I. Introduction 1. Définition

I. Introduction
1. Définition:
Réseau
Le terme générique «réseau» définit un ensemble d'entités (objets, personnes, etc.)
interconnectées les unes avec les autres. Un réseau permet ainsi de faire circuler des éléments
matériels ou immatériels entre chacune de ces entités selon des règles bien définies.
• réseau (en anglais Network) : Ensemble des ordinateurs et périphériques connectés les
uns aux autres. Notons que deux ordinateurs connectés ensemble constituent à eux
seuls un réseau minimal.
• mise en réseau (en anglais Networking) : Mise en oeuvre des outils et des tâches
permettant de relier des ordinateurs afin qu’ils puissent partager des ressources en
réseau.
Selon le type d'entité concernée, le terme utilisé sera ainsi différent :
• réseau de transport: ensemble d'infrastructures et de disposition permettant de
transporter des personnes et des biens entre plusieurs zones géographiques
• réseau téléphonique: infrastructure permettant de faire circuler la voix entre plusieurs
postes téléphoniques
• réseau de neurones: ensemble de cellules interconnectées entre-elles
• réseau de malfaiteurs: ensemble d'escrocs qui sont en contact les uns avec les autres
(un escroc en cache généralement un autre!)
• réseau informatique: ensemble d'ordinateurs reliés entre eux grâce à des lignes
physiques et échangeant des informations sous forme de données numeriques (valeurs
binaires c'est-à-dire codées sous forme de signaux pouvant prendre deux valeurs : 0 et
1)
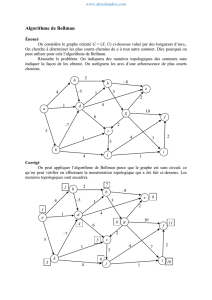
Le réseau peut étre modélisé par un graphe orienté connexe symétrique pondéré, ou un
graphe connexe non orienté pondéré. Les noeuds du réseaux correspondent aux sommets du graphe, et
les liaisons aux arcs. Le poids des arcs (u;v)et (v;u)(arcs symétriques) sont égaux.

Graphe:
Les graphes sont définies par un couple G =(X,U) de deux ensembles :
X est un ensemble {x1,x2,......,xn} de sommets (vertex) également appellés
noeuds (nodes) dans un contexte de réseau.
La lettre N est intérnationnalement utilisée pour désigner |X|, le nombre de sommets
de G.
U = {u1,u2,.........,um} est une famille (ensemble avec répétition autorisée) de
couples ordonnés de sommets appellés arcs(directed edge) si le graphe est
orienté, ou arrete (edge) si le graphe est non orienté. On utilise par convention
la lettre M pour le nombre d'arcs de G.
Les graphes se représentent graphiquement par des points ou des petits cercles designants
les sommets, et par des fleches pour les arcs ou des segments pour les arretes, réliants ces
sommets .
Graphe.
Un graphe peut étre valué, ou pondéré(weighthed). Il est alors muni de poids ou de couts sur
ses arcs ou arretes par une application C: U >IR. On le note G =(X,U,W ).
Un poids d'un graphe peut représenter toute valeur numerique associé a un arc: distance, cout
de transport, temps de parcours, probabilité de transition.

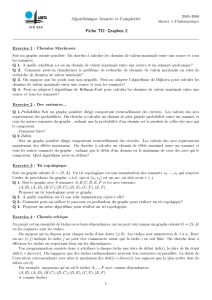
Connexité de Graphe:
graphe non connexe graphe connexe
2. Differentes parties d'un Graphe:
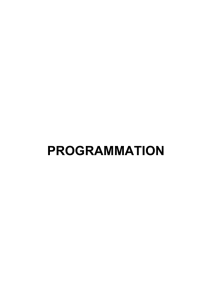
Sous graphe:
Pour un sous-ensemble de sommets A inclus dans X, le sous-graphe de G induit par A est
le graphe G = (A, U(A)) dont l'ensemble des sommets est A et l'ensemble des arêtes U(A)
est formé de toutes les arêtes de G ayant leurs deux extrémités dans A. Autrement dit, on
obtient G' en enlevant un ou plusieurs sommets au graphe G, ainsi que toutes les arcs (arretes)
incidentes à ces sommets.
graphe G. sous-graphe de G.
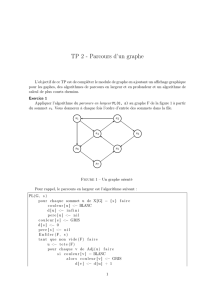
Graphe partiel:
Le graphe G' = (X, U') est un graphe partiel de G, si U' est inclus dans U. Autrement
dit, on obtient G' en enlevant une ou plusieurs arcs (arretes) au graphe G.
graphe G. graphe partiel de G.

• Remarque: Un graphe partiel d'un sous-graphe est un sous-graphe partiel de G.
3. Parcours de Graphe
Dans un graphe orienté, un chemin d'origine x et d'extrémité y est défini par une suite finie
d'arcs consécutifs, réliant x à y.
La notion correspondante dans les graphes non orientés est celle de chaine.
Un chemin élémentaire est un chemin ne passant pas deux fois par un même
sommet, c'est- à-dire dont tous les sommets sont distincts.
Un chemin simple est un chemin ne passant pas deux fois par un même arc,
c'est-à-dire dont tous les arcs sont distincts.
4. Le problème du plus court chemin:
4.1 Définition
Lorsque on cherche a se rendre d'un sommet à un autre dans un graphe, en général on se met à
chercher le plus cours chemin, par exemple si le graphe représente un réseau routier, en
cherchant le plus court chemin, on cherchera celui dont la distance est la plus courte, c'est à
dire le chemin du moindre coup.
Si les nombres de trajets possibles entre le point de départ et le point d'arrivée est faible, il
suffira de calculer les longueurs de chacun des trajets -en additionnant la longueur des liens
qui le composent et de comparer directement les longueurs obtenues.
Mais une telle solution exhaustive devient rapidement impraticable si le nombre de trajets
possible est grand.
Heureusement, il existe des algorithmes qui évitent d'avoir a calculer tout les trajets possible.

Pour cela, ils mettent en oeuvre diverses stratégies.
4.2 Complexité du problème du plus cours chemin:
On répresente un réseau par un graphe composé de noeuds (les sommets du graphe)
et des liens orientés (les arcs du graphe). Imaginons, par exemple, un réseaux composé de 20
noeuds -ce qui est trés raisonable- et comportant un lien direct entre chaque noeud (soit
380liens orientés).
Un simple calcul combinatoire montre qu'entre deux noeuds donnés, le nombre de chemins
possibles est supérieur à 6000 milliards!
Ainsi, à supposer qu'il faut 1 nano-seconde, pour calculer la longueur d'un trajet, la solution
exhaustive prendrait environ 741 jours.
Cet exemple nous montre bien la nécessité de disposer d'algorithmes, pour éviter l'explosion
combinatoire
4.3 Les problèmes de chemins optimaux:
La litérature distingue trois types de problèmes de chemins optimaux, que nous
notons A, B, C.
Probleme A: étant donné deux sommets s et t, trouver un plus cours chemin de s à t
Probleme B: étant donné un sommet de départ s, trouver un plus cours chemin de s à tout les
autres sommets.
Probleme C: trouver un plus cours chemin entre tout couple de sommets.
Ces trois problèmes sont liés, Un algorithme pour A peut bien sur étre appliqué plusieurs
fois pour résoudre B ou C.
Certains algorithmes pour B, ont la propriété de traiter définitivement un sommet de
destination à chaque itération, ils peuvent donc résoudre A en étant stoppés, dès que x=t.
La pluspart des algorithmes qui traitent les problèmes A, B, C, ne construisent qu'un des
chemins possibles parmi ceux de cout minimal joignant deux sommets.
La raison, est qu'il existe dans le pire des cas un nombre énorme de chemins de
même cout minimal, il serait impossible de les donner tous.
3.4 Les deux familles d'algorithmes:
Il existe deux grandes familles d'algorithmes:
o algorithmes à fixation d'étiquettes: sont les algorithmes qui traitent définitivement
un sommet à chaque itération: ils séléctionnent un sommet x et calculent sa valeur
définitive. Et ils sont représentés par l'algorithme de Dijkstra et ses dérivés.
o algorithmes à correction d'étiquettes: sont les algorithmes qui peuvent affiner
jusqu'a la dérniere itération l'étiquete de chaque sommet.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%