Manipulateurs électroniques pour application mobile

1/
44
Sommaire
1) Photo non contractuelle
Manipulateurs électroniques
pour application mobile
Type THE5
Série 2X
RF 29881/09.10
Remplace: 07.08
Type 2THE5 RC 1)
Type 4THE5 H 1)
2the5rc.jpg4the5h.jpg
Particularités
– Spécialement conçu pour les engins mobiles
– Disponibles en versions: Signal Tension, Signal PWM, CAN,
Puissance
– Fiabilité mécanique des pièces provenant des
télécommandes hydrauliques
– Multiples types de poignées ergonomiques dotées d’une
variété de contacts électriques on / off ou proportionnels
– Divers types de pédales
– Ergonomie comparable à celle des manipulateurs
hydrauliques
– La conception garantit une excellente protection
de l’électronique
– Capteurs sans contact à effet hall
Sommaire page
Particularités ..............................................................................1
Fonctionnement, coupe .............................................................2
4THE5, 6THE5, 8THE5, 2THE5R .......................................3 à 5
Codification ................................................................................6
Caractéristiques mécaniques ....................................................7
Guide de Paramétrage du Logiciel ............................................7
Caractéristiques Signal Tension
• Electriques ....................................................................8 et 9
Caractéristiques Signal PWM
• Electriques ................................................................10 et 11
• Logiciel .......................................................................12 à 16
Caractéristiques Puissance
• Electriques .................................................................17 à 20
• Logiciel .......................................................................20 à 26
Caractéristiques Bus CAN
• Electriques .................................................................27 à 29
• Logiciel .......................................................................30 à 37
Mesures de sécurité ................................................................38
Outil de configuration...............................................................39
Affectation des broches ...................................................40 à 44

2
6
8
3
1
4
5
7
2
6
1
8
3
8
7
4
5
2/
44
Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
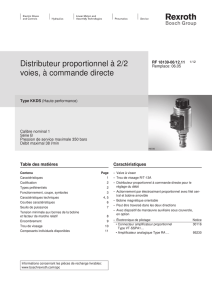
Fonctionnement, coupe
Composition
Les manipulateurs de type THE5 se composent d’un organe
de commande (pédale ou poignée) (1), d’un corps ou plaque
de fixation (2) et d’un boîtier (3) contenant les capteurs sans
contact et les cartes électroniques.
Généralités
Les différents types de THE5 comportent des mécaniques et
des ergonomies similaires à celles des manipulateurs hydrau-
liques. Cette conception procure aux THE5 un haut niveau de
robustesse. Les THE5 se différencient par les fonctions élec-
troniques intégrées et la nature des signaux de sortie.
La télécommande Signal Tension nécessite une alimentation
régulée extérieure pour l’alimentation de ses capteurs. Il
génère une consigne analogique en tension (V).
Les télécommandes Signal PWM, CAN et Puissance
intègrent une régulation de l’alimentation et peuvent donc
être alimentées directement par la batterie du véhicule.
La télécommande CAN génère périodiquement une trame sur
bus CAN qui permet le dialogue avec d’autres systèmes.
Les télécommandes Signal Tension, Signal PWM et CAN
génèrent des signaux de faible puissance. La commande
d’un axe électro-hydraulique nécessite l’adjonction extérieure
d’une interface électronique de puissance.
Coupe 4THE5 Coupe 2THE5R
La télécommande Puissance délivre des courants en modula-
tion de durée d’impulsion pour la commande directe de
réducteurs de pression électro-hydrauliques proportionnels.
Les manipulateurs équipés de microprocesseurs (Signal
PWM, CAN, Puissance) disposent d’interfaces ISOK pour la
communication avec un PC.
Fonctionnement
Au repos, la commande est maintenue en position neutre par
les ressorts de rappel (8).
Lorsque la commande (pédale ou poignée) (1) est inclinée, le
poussoir (5) qui s’enfonce comprime le ressort de rappel (8).
L’aimant (7) lié mécaniquement au poussoir (5) se déplace
vers le haut ou vers le bas en suivant le sens de manœuvre
de la commande. La consigne générée par le capteur (4) est
proportionnelle à l’angle d’inclinaison du levier ou de la
pédale.
Le soufflet (6) protège les parties mécaniques des manipula-
teurs contre les pollutions extérieures.

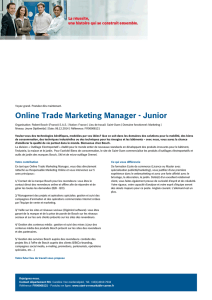
4THE5 H 1)
Hydraulics Bosch Rexroth AGRF 29881/09.10 THE5 3/
44
D
Ø7
Ø81 mini
Caractéristiques particulières
– Le 4THE5 est disponible en version Signal Tension, CAN,
Signal PWM ou Puissance.
– Compatibilité électromagnétique (CEM) à partir des normes
ISO 7637, 11452.
– Ergonomie similaire à celle des télécommandes
hydrauliques de type 4TH6 et 4TH5.
– Durée de vie jusqu’à 5 millions de cycles.
– Jusqu’à 4 axes proportionnels intégrés.
Branchement: schéma de principe
Voir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN),
ou 11 (Puissance).
Courbes caractéristiques des sorties
Voir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN),
ou 11 (Puissance).
Précautions de montage
– Surface de bridage: planéité = 0,5 mm.
– Dimension des têtes de vis = Ø 10 mm.
– Couple de serrage des vis de bridage = 10 Nm maxi.
Implantation
4THE5, 6THE5, 8THE5
Application
Le manipulateur de type 4THE5 est destiné au montage en
accoudoir pour la commande de l’équipement des machines
mobiles. L’électronique intégrée dans le boîtier permet de
commander jusqu’à 4 axes proportionnels avec un seul
appareil si elle est raccordée aux capteurs proportionnels de
la poignée.
– diamètre nominal / fixation par 4 vis
D = Ø100 à Ø113 mm.
1) Photo non contractuelle

A
89,515 29 Y
2+ 2– 1– 1+
Ø7
Ø81 mini D
A
Ø81
5813 29 Y
2+ 2– 1– 1+
Ø81
1– 1+
20
15
2–2+
1–
1+
75
G
1+1–
2+
2–
20
20
100 x 100
Ø10
28
10,598
20
20
20
2+
2–
100 x 100
Ø10
32
12,5
7
7
4/
44
Bosch Rexroth AG Hydraulics THE5 RF 29881/09.10
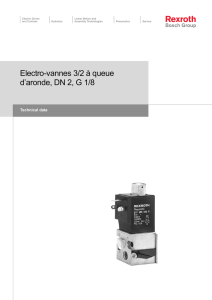
Cotes d’encombrement (en mm)
Manipulateur Signal et CAN
THES5, THESW5, THEC5
4THE5, 6THE5, 8THE5
Manipulateur Puissance
THE5
Encombrement en fonction du type de poignée
Type de poignée Y (avec levier coudé) Z (avec levier droit)
EC2000 207 211,5
EC2000+ 215,5 220,5
EC4000 250,5 257
Ø100 à Ø113 Ø100 à Ø113
MaxiMiniMaxi MiniMaxi Mini MaxiMini
Vue G Vue A Vue A

240
1–
63
–12
100
+12
74 4
20
105
1+
4 x Ø9
125
307
180
5,7
74
41,5
25
72
17
42,5 300 ± 10
160
111
4 x Ø9
40
55
Hydraulics Bosch Rexroth AGRF 29881/09.10 THE5 5/
44
Caractéristiques particulières
– Le 2THE5R est disponible en version Signal Tension, CAN,
Signal PWM ou Puissance.
– Compatibilité électromagnétique (CEM) à partir des normes
ISO 7637, 11452.
– Ergonomie similaire à celle des télécommandes électroni-
ques de type 2THE6R et hydrauliques de type 2TH6R.
– Durée de vie jusqu’à 1 million de cycles.
– Jusqu’à 2 axes proportionnels intégrés.
Branchement: schéma de principe
Voir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN),
ou 11 (Puissance 2)).
Courbes caractéristiques des sorties
Voir pages 5 (Signal Tension), 7 (Signal PWM), 9 (CAN),
ou 11 (Puissance 2)).
Application
La télécommande hydraulique à pédale de type 2THE5R est
destiné à la commande par le pied de fonctions diverses.
2THE5R
1) Photo non contractuelle
2) La version puissance est en cours de développement
Mini Maxi
Précautions de montage
– Surface de bridage: planéité = 0,5 mm.
– Dimension des têtes de vis = Ø 13 mm.
– Couple de serrage des vis de bridage = 10 Nm maxi.
Cotes d’encombrement (en mm) Implantation
2THE5 RC 1)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%