Pourquoi orienter un panneau solaire

OLYMPIADES DE PHYSIQUE 2008
LGT Jean Monnet Annemasse 74

Pourquoi orienter un panneau solaire ?........................... p 3
Hypothèse de départ...................... ........... ........... p 3
PRESENTATION GENERALE
I) Première approche : Explication du système d’axe.......... p 4
II) Présentation des moteurs.....................................p 6
III) Présentation de la platine................................... p 8
IV) Alimentations.................................................. p 10
MODES DE FONCTIONNEMENT
I) Mode par suivi théorique.......................................p 12
II) Mode capteur
1° Placement des capteurs.................................... p 13
2° Présentation du support de capteur....................... p 14
3° Présentation de la plaque électronique.................... p 16
4° Présentation du programme................................ p 18
III) Cycle de départ.............................................. p 19
IV) Mode utilisant la tension du panneau........................ p 21
BILAN ENERGETIQUE............................................p 22
QUELQUES APPLICATIONS......................................p 24
ANNEXES....................................................................p 25

Pourquoi orienter un panneau solaire ?
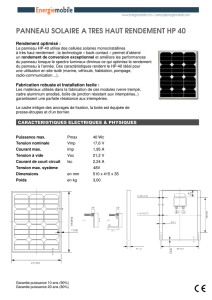
Un panneau solaire transforme l’énergie du soleil en énergie électrique : Le
panneau est constitué de couches de silicium chargées positivement et
négativement. Quand les rayons du soleil entre en contact avec le panneau, il
fournit de l’énergie qui permet de réaliser une réaction entre les couches : Cela
crée une différence de potentiel électrique et donc crée un courant électrique
qui peut charger des batteries. De plus, plus le panneau reçoit d’énergie solaire,
plus il produit d’électricité.
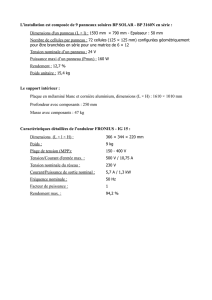
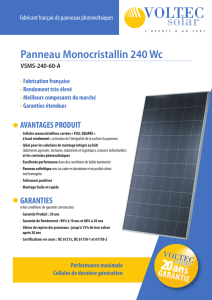
Cela nous a amené à réfléchir à
comment optimiser la réception d’énergie.
Après quelques recherches, nous avons
découvert que le panneau reçoit mieux les
rayons du soleil si ceux ci arrivent
perpendiculairement au plan formé par le
panneau (comme sur l’image de gauche de la
figure si dessous). Il y a plusieurs raisons à
cette position :
-La réflexion est quasi nulle quand le panneau
est de face.
-Nous avons aussi remarqué que, comme nous
montre la figure à gauche, la surface sur
laquelle les rayons tapent est réduite quand le
panneau n’est pas perpendiculaire aux rayons
Hypothèse de départ
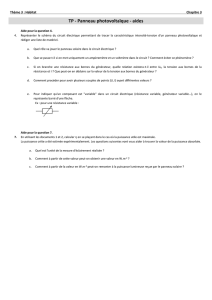
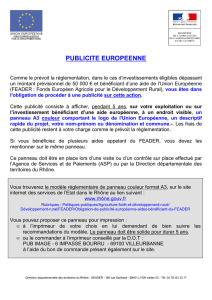
Nous avons, pour trouver comment orienter
le panneau, réalisé une étude sur le
déplacement de la terre autour du soleil. Cela
nous a amené à découvrir que la terre ne
réalise pas un cercle autour du soleil, mais
une ellipse (voir figure). Cela modifie
l’attraction gravitationnelle du soleil sur la
terre et donc fait varier la vitesse de terre :
La terre ne tourne pas à vitesse constante
autour du soleil, cela influe sur la durée des
journées : La rotation de la terre sur elle même est influencée par celle de la
terre autour du soleil. Cela modifie l’heure du « midi moyen » (qui est la moyenne
entre les midis), le midi étant le moment de la journée ou le soleil est le plus haut
dans le ciel. Cela fait aussi varier la durée des journées. Ce décalage n’étant pas
constant et de plus, relativement minime, nous n’en tiendrons pas compte pour la
suite.

I) Première approche : Explication du système d’axe
Comme nous l’avons vu précédemment, le panneau solaire doit suivre le
soleil, c’est à dire, il faut que les rayons qu’il reçoit lui soient perpendiculaires.
Pour cela, il faut rendre le panneau mobile, il faut donc concevoir un mécanisme
qui permettrait au panneau de suivre le soleil suivant sa position dans la journée
(de l’est à l’ouest) et sa hauteur dans le ciel qui change avec la déclinaison
solaire (angle variant à cause de l’inclinaison de la terre).
Cela nous fait donc deux axes à contrôler. Pour cela, sur notre système
nous avons deux moteurs qui ont pour chacun d’eux, le but de rendre un de ces
mouvements possible.
Nous avons un moteur qui entraîne la rotation d’un arbre sur lequel est
fixé le panneau. Cela donc permettra au panneau d’aller de l’est à l’ouest.

Pour le deuxième axe, nous avons un moteur qui entraîne une vis sans fin afin
d’obtenir un pantographe ou une sorte de cric. En tournant, la vis sans fin
éloignera ou rapprochera les côtés du cric à l'aide d'écrous dans lesquels celle-ci
passe. Ceci fera rétrécir ou grandir le cric.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%