SIMULATION DES SYSTEMES DE PRODUCTION

SIMULATION
SYSTÈMES DE PRODUCTION
RÉSEAUX DE PETRI
SIMAN - ARENA
Jean-Louis Boimond
Table des matières
I INTRODUCTION À LA SIMULATION ........................................................................................................... 2
I.1 L’ÉTAPE DE MODÉLISATION ............................................................................................................. 4
I.2 LES LIMITES DE LA SIMULATION .................................................................................................... 4
II LA SIMULATION DES SYSTÈMES DE PRODUCTION .............................................................................. 5
II.1 OUTILS DE MODÉLISATION .............................................................................................................. 6
II.2 APPLICATION AUX SYSTÈMES DE PRODUCTION ...................................................................... 7
II.3 UTILISATION DE L’INFORMATIQUE ............................................................................................ 10
III RAPPELS DE PROBABILITÉS ET STATISTIQUES .................................................................................. 11
III.1 VARIABLES ALÉATOIRES CONTINUES ....................................................................................... 12
III.2 LOIS DE DISTRIBUTION STANDARD ........................................................................................... 13
III.3 VARIABLES ALÉATOIRES DISCRÈTES ....................................................................................... 16
IV DONNÉES D'ENTRÉE DU SYSTÈME ........................................................................................................ 18
IV.1 CONNAISSANCE PARTIELLE DES DONNÉES ............................................................................ 18
IV.2 DONNÉES EXISTANTES (accessibles à la mesure) .......................................................................... 19
V. VÉRIFICATION ET VALIDATION DES MODÈLES .................................................................................. 21
V.1 VÉRIFICATION ..................................................................................................................................... 21
V.2 VALIDATION ......................................................................................................................................... 22
VI INTERPRÉTATION DES RÉSULTATS....................................................................................................... 24
VI.1 ANALYSE DES SYSTÈMES FINIS ..................................................................................................... 25
VI.2 ANALYSE DES SYSTÈMES QUI NE SE TERMINENT PAS ........................................................ 26
VII NOTIONS ELÉMENTAIRES SUR LES RÉSEAUX DE PETRI ................................................................ 27
VII.1 GÉNÉRALITÉS ................................................................................................................................... 27
VII.2 GRAPHES D'ÉVÉNEMENTS ............................................................................................................ 29
VII.3 EXEMPLES .......................................................................................................................................... 29
VII.4 AUTRES CLASSES DE RÉSEAUX DE PETRI ............................................................................... 30
VIII LE LANGAGE DE SIMULATION SIMAN-ARENA ................................................................................ 32
VIII.1 NOTIONS DE BASE .......................................................................................................................... 32
VIII.2 DESCRIPTION DE QUELQUES BLOCS PERMETTANT LA CONSTRUCTION D’UN
MODÈLE ......................................................................................................................................................... 36
VIII.3 DESCRIPTION DE QUELQUES BLOCS PERMETTANT L’ANALYSE D’UN MODÈLE .... 47
VIII.4 ANIMATION GRAPHIQUE ............................................................................................................ 51
VIII.5 DONNÉES D'ENTRÉES ................................................................................................................... 54
VIII.6 ANALYSE DES RÉSULTATS .......................................................................................................... 55

1
Bibliographie
Introduction to Simulation Using SIMAN. Second Edition, C. Dennis Pegden, R.E. Shannon, R.P.
Sadowski, Ed. Mc Graw-Hill.
Handbook of Simulation: Principles, Methodology, Advances, Applications, and Practice, J. Bank , Wiley
Interscience, 1998.
Discrete Event Systems - Modeling and Performance Analysis, Christos G. Cassandras, Aksen Associates
Incorporated Publishers, ISBN 0-256-11212-6.
Optimisation des flux de production : Méthodes et simulation, A. Ait Hssain, Ed. Dunod, 2000.
Probabilités et statistiques. 3ème édition, A. Ruegg, Presses Polytechniques Romandes.
Du Grafcet aux réseaux de Petri. R. David, H. Alla, Hermès, 1989.
Cours de « Simulation des systèmes de production », A. Ait Hssain, Ed. 96/97 - INSA Lyon.
Cours de « Simulation », N. Mebarki, 97/98 - IUT OGP Nantes.
Cours de « Simulation informatique des systèmes de production », P. Castagna, A. L'Anton, N. Mebarki,
97/98 - IUT OGP Nantes.
Cours de « Réseaux de files d'attente et simulation », J. P. Chemla, 96/97 - Université de Tours.
Cours de « Simulação de Sistemas Dinâmicos », R. Santos Mendes, 02/03 - UNICAMP - Campinas, Brésil
(http://www.dca.fee.unicamp.br/~rafael/).
Dossier de présentation « Arena. La solution simulation », Ouroumoff Diffusion, Lyon.

2
I INTRODUCTION À LA SIMULATION
La simulation est un processus qui consiste à :
- Concevoir un modèle du système (réel) étudié,
- Mener des expérimentations sur ce modèle (et non pas des calculs),
- Interpréter les observations fournies par le déroulement du modèle et formuler des
décisions relatives au système.
Le but peut être de comprendre le comportement dynamique du système, de comparer des
configurations, d’évaluer différentes stratégies de pilotage, d’évaluer et d’optimiser des
performances.
La simulation est une technique, appliquée dans ce cours aux systèmes de production,
permettant d'étudier le comportement d'un système dynamique en construisant un modèle
logiciel de celui-ci.
Les domaines d'application sont divers. Sont listés ci-dessous quelques classes d’applications
et quelques exemples de problèmes typiques rattachés à ces classes :
Systèmes de flux de production
- équilibrage de lignes d’assemblage,
- conception de systèmes de transfert entre des postes,
- dimensionnement des stocks d’un atelier,
- comparaison de pilotage,
- évaluation de la charge prévisionnelle,
- étude de la synchronisation entre les réceptions des pièces et l’assemblage.
Flux logistiques et systèmes de transport
- conception et dimensionnement d’entrepôts,
- dimensionnement d’une flotte de camions,
- étude de procédures de contrôle des flux de véhicules en circulation.
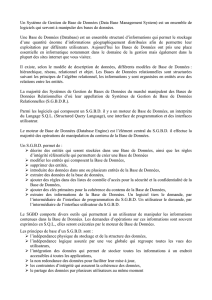
Calendrier
SCHEDULES
CREATE
Operateur
SEIZE
10
DELAY
DISPOSE
Date de sortie
VARIABLES
Date de sortie
ASSIGN
NR(Machine)
NR(Operateur)
DSTATS
Operateur
RELEASE
1
DELAY
1
DELAY
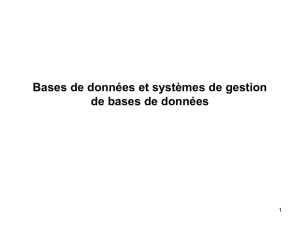
Modélisation
Analyse des
résultats

3
Production des services
- étude de transactions bancaires,
- gestion de restaurants,
- comparaisons de politiques de maintenance des avions.
Systèmes informatiques et télécommunications
- évaluation de protocoles de gestion des transactions de bases de données,
- étude de la file d’attente mémoire d’un serveur,
- étude des comportements des utilisateurs,
- conception et dimensionnement de hubs (« moyeu »).
Autres classes d’applications
- domaine militaire (support logistique, coordination des opérations, …),
- gestion d’hôpitaux (personnel, lits, service d’urgence, …),
- le nucléaire, la météo, les jeux, ...
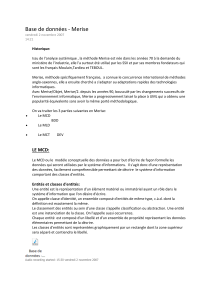
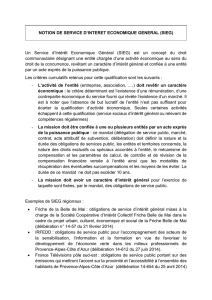
Méthodologie générale
On distingue classiquement quatre phases distinctes : La modélisation (représenter le
comportement du système), la programmation, l'expérimentation et l'interprétation des
résultats (accompagnée d’actions).
(a) Modèle conceptuel : Le modèle n'est qu'une approximation du système, il est conditionné
par l'objectif de l'étude.
(b) Expérimentation : Il s'agit de construire des théories, ou hypothèses, qui prennent en
compte le comportement observé.
Le passage du système au modèle conceptuel est une étape essentielle pour la simulation.
Dans le cadre de ce cours, on utilise une modélisation conceptuelle par réseaux de Petri (cf.
chp. VII). Le passage du modèle conceptuel au modèle/programme de simulation se fait en
utilisant le langage Siman-Arena ; ce langage de simulation permet également d’extraire des
résultats issus de différentes expérimentations (cf. chp. VIII).
Figure 1 : Méthodologie d'une simulation.
Résultats
Modèle conceptuel(a)
Programme de
simulation
Analyse & Modélisation
Interprétation
& Action
Correction
Correction
Vérification
Programmation
Expérimentation(b)
Validation
Système (réel)

4
I.1 L’ÉTAPE DE MODÉLISATION
L’étape de modélisation est une phase essentielle à la simulation. Différents points doivent
être abordés :
Définir l'objectif de la modélisation (lié au cahier des charges) : Pourquoi modélise-t-on ?
Qu'étudie-t-on ? Que veut-on améliorer, ou faire ?
Définir les éléments du système (via la réalisation d'une fonction, ou d'un processus) et les
limites du système (les entrées, les sorties).
Définir les interactions entre ces éléments (hiérarchie).
Définir la dynamique du système (entités qui circulent entre les éléments, comportement du
système au cours du temps).
Abstraction (choisir les éléments du système pertinents pour l'étude).
Formalisation, conceptualisation : Modèle mathématique (algèbre (max, +), chaînes de
Markov), modèle logiciel (Simulink, Siman-Arena), modèle graphique (réseaux de Petri,
bond graphs).
I.2 LES LIMITES DE LA SIMULATION
Certaines limites sont dues à la technique elle-même, d'autres sont dues aux produits
actuellement disponibles sur le marché (notons qu’une formation sur les logiciels utilisés est
souvent nécessaire) :
La programmation demande un certain niveau d'expertise. La qualité des résultats fournis
lors de l'analyse des solutions est liée à la qualité de la modélisation et au savoir-faire du
« modélisateur » (la modélisation est un métier).
La simulation n'est pas une technique d'optimisation au sens propre. Elle ne peut qu'établir
les performances d'une solution conçue et imaginée par l'utilisateur. C'est une technique
entièrement itérative qui ne propose pas de solution finale mais qui permet seulement à
l'utilisateur d'envisager des choix possibles. En tout état de cause, c'est lui qui devra
décider de ce qui répond le mieux aux problèmes posés.
La difficulté liée à la simulation est double :
Les résultats de simulation sont souvent complexes à interpréter. On étudie des
phénomènes aléatoires et les techniques d'analyse demandent de la rigueur ; il est souvent
difficile de faire la part du crucial et de l'anecdotique (le modèle doit être ni trop grossier,
ni trop précis).
Souvent pour des raisons financières, on doit aller au plus vite vers une solution finale
(sans passer trop de temps à explorer d’autres solutions intermédiaires).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
1
/
56
100%