Support systèm e des accès utilisateurs

Support système des accès utilisateurs STS SIO, 1ère année
Chapitre 3 : Les échanges au sein de la carte mère page 1
Support système des accès utilisateurs
SI
1
BTS Services Informatiques
aux Organisations
1ère année
Chapitre 3 :
Les échanges au sein
de la carte mère
Objectifs :
Comprendre les mécanismes d'échange au sein de la carte mère, entre la mémoire
centrale et le processeur et au sein du processeur.
Plan :
1. Les bus de données : des autoroutes sur la carte mère.
1.1. Les différents types de bus.
1.2. Le bus FSB.
1.3. Le bus HSB.
1.4. Le NorthBridge.
1.5. Le SouthBridge.
1.6. Évolution.
2. La mémoire centrale : la RAM.
2.1. Histoire de barrettes.
2.2. Les technologies des RAM.
2.3. Le marché de la barrette.
2.4. Le bon timing.
3. Les processeurs.
3.1. Processeur et fréquence.
3.2. Les instructions du processeur.
3.3. Les registres.
3.4. Unités fonctionnelles.
3.5. HyperThreading et multi-cœur.
Ressources :
Comment ca marche : Le processeur
Vulgarisation-informatique : La mémoire

Support système des accès utilisateurs STS SIO, 1ère année
Chapitre 3 : Les échanges au sein de la carte mère page 2
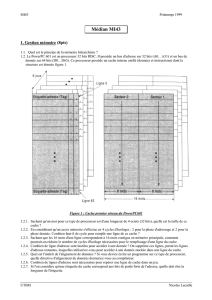
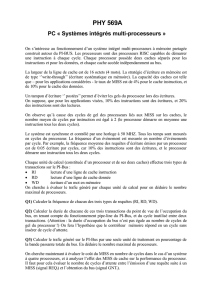
1. Les bus de données : des autoroutes sur la carte mère.
On appelle bus tout canal physique de communication entre plusieurs dispositifs. Ainsi, on trouve des bus
sur les cartes mères, mais également au sein du microprocesseur ou entre plusieurs ordinateurs.
1.1. Les différents types de bus.
Parmi les bus que l'on rencontre au sein d'un ordinateur, on trouve :
Le bus d'adresses (appelé parfois bus d'adressage ou bus mémoire) transporte les adresses mémoire
auxquelles le processeur souhaite accéder pour lire ou écrire une donnée.
Le bus de contrôle (parfois bus de commandes) transporte les ordres et les signaux de synchronisation
en provenance de l’unité de commande et à destination de l'ensemble des composants matériels. Il
s'agit d'un bus directionnel dans la mesure où il transmet également les signaux de réponse des
éléments matériels.
Le bus de données véhicule les informations en provenance ou à destination du processeur. Il s'agit
d'un bus bidirectionnel.
Les bus d'adresses et de contrôle sont internes au microprocesseur.
Les bus de données sont ceux qui permettent au microprocesseur de communiquer avec le reste des
composants de la carte mère.
Micro
-
Processeur
FSB
Cache
niveau 2
North
bridge
Bus AGP
Carte
graphique
RAM
South
bridge
ATA
ISA
Bus PCI Express
Cartes
d'extension
Stockage
de masse
SCSI
HSB
COM
LPT
USB
FireWire
Lecteurs
disquettes
Port
Réseau
Bus PCI

Support système des accès utilisateurs STS SIO, 1ère année
Chapitre 3 : Les échanges au sein de la carte mère page 3
1.2. Le bus FSB.
Le FSB ou Front Side Bus est appelé Bus processeur ou bus système. C'est celui qui entre et qui sort du
microprocesseur. Ce bus a une fréquence particulièrement élevée (jusqu'à 3,3 GHz).
Le bus de communication avec la mémoire cache L2 ou L3 est directement connecté (comme une
dérivation) sur le FSB. La mémoire cache est ainsi considérée comme intégrée au processeur tellement les
temps de réponse sont infimes.
C'est ensuite le northbridge qui gère les échanges avec les autres composants.
1.3. Le bus HSB.
Le HSB ou High Speed Bus, également appelé Bus Interne, est le bus qui relie le northbridge au
southbridge. Malgré son nom, il a des fréquence de fonctionnement moindre que le FSB.
1.4. Le NorthBridge.
Le northbridge a un rôle essentiel : gérer les flux d'échanges de données avec tous les éléments de la carte
mère, en privilégiant le bus RAM et le bus PCIExpress x16 (destiné à la carte graphique).
Le nom de northbridge est en voie d'être abandonné au profit de MCH pour Memory Controller Hub
1.5. Le SouthBridge.
Le southBridge permet de contrôle des bus éloignés comme ISA, PCI, ATA, SATA, PCI Express…
Le nom de southbridge est en voie d'être remplacé par ICH pour I/O Controller Hub.
1.6. Évolution.
Les nouvelles architectures tendent à faire disparaître le northbridge-MCH.
En effet, le contrôleur de RAM est intégré au processeur pour améliorer encore les échanges, comme c'est
le cas pour les processeurs i7 depuis la série 900.
Du coup, le bus FSB disparaît également, au profit du bus QPI (QuickPath Interconnect) chez Intel ou
HyperTransport chez AMD. Ceux-ci offrent de meilleurs temps de réponse, et une meilleure gestion des
échanges.
2. La mémoire centrale : la RAM.
2.1. Histoire de barrettes.
Les premières mémoires se présentaient sous la forme de puces appelées DIP
(Dual Inline Package).
Désormais les mémoires se trouvent généralement sous la forme de barrettes,
c'est-à-dire des cartes enfichables dans des connecteurs prévus à cet effet.

Support système des accès utilisateurs STS SIO, 1ère année
Chapitre 3 : Les échanges au sein de la carte mère page 4
On distingue deux types de barrettes de RAM : les barrettes au format SIMM (Single Inline Memory
Module) et les barrettes au format DIMM (Dual Inline Memory Module) : ce sont des circuits imprimés
possédant respectivement sur une ou deux faces des puces de mémoire.
Les barrettes au format SIMM (Single Inline Memory Module) ne
possèdent de puces de mémoire que sur un seul côté. Ce type de
barrettes a disparu avec l'apparition des premiers pentiums.
Les barrettes au format DIMM (Dual Inline Memory Module) sont
des mémoires 64 bits qui possèdent des puces de mémoire de part et
d'autre du circuit imprimé.
A noter que les connecteurs DIMM ont été améliorés afin de
permettre une insertion facile des barrettes grâce à des leviers situés
de part et d'autre du connecteur.
2.2. Les technologies des RAM.
La SDRAM (Synchronous DRAM, traduisez RAM dynamique synchrone), apparue en 1997, permet une
lecture des données synchronisée avec le bus de la carte-mère. La SDRAM est capable de fonctionner
avec une cadence allant jusqu'à 150Mhz, lui permettant d'obtenir des temps d'accès d'environ 10ns.
La DDR-SDRAM (Double Data Rate SDRAM) est une mémoire fondée sur
la technologie SDRAM, exploite simultanément deux canaux, permettant
ainsi de doubler le taux de transfert de la SDRAM à fréquence égale.
Apparue en 2000, elle s'est généralisée au détriment de la SDRAM. Elle a
également été commercialisée sous le nom de DDR ou DDR 1.
Puis les évolution technologiques ont permis de multiplier le nombre de
canaux d'échange des flux de données, pour donner en 2003 la DDR II avec 4
canaux et en 2007 la DDR III et ses 8 canaux.
Le déplacement du détrompeur permet de ne pas utiliser une barrette à la
place d'une d'une autre génération.

Support système des accès utilisateurs STS SIO, 1ère année
Chapitre 3 : Les échanges au sein de la carte mère page 5
2.3. Le marché de la barrette.
Le nom commercial de ces barrettes commence par PC, suffixé de leur bande passante ou DDR suffixé de
la fréquence.
PC est suivi d'un 2 pour la DDR II et d'une 3 pour la DDR III.
Barrette Fréquence MHz Bande passante
maximale Nom commercial
du bus DDR Puce Barrette
DDR-SDRAM
DDR
DDR I
100 2x100 = 200 200 x 8 = 1600 Mio/s
PC 1600 DDR-200
… … … … …
200 400 3200 Mio/s PC 3200 DDR400
DDR II
QDR
100 2x200=400 400x8 = 3200 Mio/s PC2 4300 DDR2-400
… … …
300 1200 1200 x 8 = 9600
Mio/s
PC2 9600 DDR2-1200
DDR III
100 800 800 x 8 = 6400 Mio/s
PC3 6400 DDR3-800
… … … … …
375 3000 24000 Mio/s PC3 24000 DDR3-3000
Il n'y a pas de différence architecturale entre les différentes DDR SDRAM conçues pour les différentes
fréquences d'horloge, comme par exemple entre la PC3 6400 et la PC3 24000.
Le nombre indique simplement le niveau de fonctionnement garanti pour chaque type de mémoire.
Il est possible d'utiliser de la DDR SDRAM à une fréquence inférieure à celle prévue (sous-fréquençage)
ou supérieure (sur-fréquençage), ce qui n'est toutefois à tenter qu'avec des mémoires de haute qualité.
2.4. Le bon timing.
Les barrettes sont généralement accompagnées d'une notation du type 3-2-2-2 ou 7-7-7-19 pour décrire le
paramétrage de la mémoire vive. Cette suite de quatre nombres décrit la synchronisation de la mémoire
(en anglais timing), c'est-à-dire la succession de cycles d'horloge nécessaires pour accéder à une donnée
stockée en mémoire vive.
Lorsqu'on parle de timings mémoire on communique souvent les timings dans l'ordre suivant (même si ce
n'est pas indiqué) :
CAS ou CAS delay (column address strobe)
RAS to CAS
RAS precharge Time
RAS (row address strobe)
 6
7
8
9
6
7
8
9
1
/
9
100%