Projet de TDO Mémoires FLASH et bus de données Etude et

Projet de TDO
Mémoires FLASH et bus de données
Etude et comparaison
Sophie Sivignon
Florent Castelli
Groupe 2
Mars 2005

2
Introduction
Actuellement, sans forcément le savoir, nous sommes tous entourés par ce qui est une des
dernières révolutions technologiques. Cette révolution a ouvert de nombreuses portes et
énormément réduit les coups de fabrication. Celle-ci est la mémoire Flash. La mémoire Flash
se retrouve partout : ordinateurs, mémoires pour appareils photos, clés USB, cartes contrôleur
ou d’extension et bien d’autres applications. Cette mémoire si répandue de nos jours dépend
du périphérique sur lequel elle est connectée. Et ce périphérique communique avec d’autres et
échange des informations ; cela se fait par l’intermédiaire d’un bus de données. Tout le monde
connaît au moins l’USB. Mais il en existe d’autres qui ont chacun leurs avantages et nous
allons en étudier quelques uns dans ce rapport.
Nous verrons donc une explication sur le fonctionnement des mémoires Flash. Ensuite nous
nous intéresserons au fonctionnement du bus SPI et Microwire. Nous verrons en détail le bus
I²C et enfin une comparaison entre ces déférents bus.
Introduction _______________________________________________________________ 2
I – Mémoires Flash _________________________________________________________ 3
II – Bus de données _________________________________________________________ 5
1) SPI ______________________________________________________________________ 5
2) Microwire ________________________________________________________________ 6
3) I²C ______________________________________________________________________ 7
Présentation _________________________________________________________________________ 7
Protocole ___________________________________________________________________________ 7
Driver______________________________________________________________________________ 8
4) Comparaison______________________________________________________________ 8
Conclusion _______________________________________________________________ 10
Annexe __________________________________________________________________ 11
Driver I²C pour 6502 __________________________________________________________ 11

3
I – Mémoires Flash
La mémoire flash est une mémoire à semi-conducteurs, non volatile et réinscriptible, c'est-à-
dire une mémoire possédant les caractéristiques d'une mémoire vive mais dont les données ne
disparaissent pas lors d'une mise hors tension (mémoire de masse). Ainsi, la mémoire flash
stocke les bits de données dans des cellules de mémoire, mais les données sont conservées en
mémoire lorsque l'alimentation électrique est coupée.
En dépit de sa relative lenteur, la durée de vie et la consommation faible (et même nulle au
repos) de la mémoire flash la rendent utile pour de nombreuses applications : appareils photo
numériques, téléphones cellulaires, assistants personnels (PDA), ordinateurs portables ou
dispositifs de lecture et d'enregistrement sonore comme les baladeurs MP3, clef USB. De
plus, ce type de mémoire ne possède pas d'éléments mécaniques, ce qui lui confère une assez
grande résistance aux chocs.
La mémoire flash est un type d'EEPROM (Electrically Erasable Programmable ReadOnly
Memory) qui permet la modification de plusieurs espaces mémoires en une seule opération.
La mémoire flash est donc plus rapide lorsque le système doit écrire à plusieurs endroits en
même temps.
Elle existe sous deux formes: flash NOR et NAND, d'après le type de pont logique utilisé
pour chaque cellule de stockage.
La mémoire flash NOR est la première à être développée par Atmel. Les temps d'effacement
et d'écriture sont longs mais elle possède une interface d'adressage permettant un accès
aléatoire à n'importe quelle position. Elle est adaptée à l'enregistrement de programmes
informatiques qui sont rarement mis à jour, comme dans les appareils photo numériques ou
les organisateurs personnels. Elle peut supporter de 10 000 à 100 000 cycles d'effacement.
La mémoire flash NAND fut développée par Toshiba. Elle est plus rapide à l'effacement et à
l'écriture, offre une plus grande densité, un coût moins important par bit et une durée de vie
dix fois plus importante. Toutefois son interface d'entrée / sortie n'autorise que l'accès
séquentiel aux données. Elle est donc utilisée pour le stockage d'informations et est moins
utile en tant que mémoire pour ordinateurs.
Dans la mémoire flash NOR, chaque cellule de mémoire est similaire à un transistor standard
MOSFET, excepté qu'il y a deux portes au lieu d'une. Une des deux portes est le CG (Control
Gate) comme dans les autres transistors MOS et la seconde est la FG (Floating Gate) qui est
isolée par une couche d'oxyde. Ainsi les électrons, passant au dessus, se retrouvent
emprisonnés et stockent l'information.
Lorsque les électrons sont sur la FG, ils modifient partiellement le champ magnétique venant
du CG qui modifie la tension de la cellule. De ce fait, lorsque la cellule «est lue» une tension
spécifique est placée sur le CG, le courant électrique passe ou ne passe pas selon la tension de
la cellule qui est, elle, commandée par le nombre d'électrons stockés sur le FG. La présence
ou l'absence de courant électrique est traduite par des 0 et des 1, reproduisant ainsi les
données stockées.
Dans un dispositif à plusieurs niveaux de cellules, qui stocke plus de 1 bit de données par
cellule, connaître le flux de passage du courant électrique plutôt que simplement sa présence
ou son absence permet de mieux déterminer le nombre d'électrons stockés sur le FG.

4
Une NOR flash cellule est programmée en utilisant un processus appelé hot-electron injection
qui consiste à placer un haut voltage sur le CG pour obtenir un champ électrique assez fort
pour déplacer le flux d'électrons d'un pôle à un autre. La plupart des composants des
mémoires flash NOR modernes sont divisés en segments effaçables appelés blocs ou secteurs.
Toutes les cellules mémoires d'un bloc doivent être effacées en même temps.
La programmation NOR peut généralement être exécutée à un octet ou mot à la fois.
En ce qui concerne la NAND flash, elle utilise le procédé de tunnel injection pour l'écriture et
le tunnel release pour l'effacement.

5
II – Bus de données
1) SPI
Le « Serial Peripheral Interface Bus » ou bus SPI de Motorola est un standard de contrôle
adapté à presque tous les équipements électroniques qui acceptent un flux de bits en série et
avec une horloge.
SPI est très peu cher car il utilise très peu de fils et donc moins de place sur un circuit intégré
et il ne multiplie donc pas les broches sur les composants. On peut aussi l’implémenter en
software avec peu de pattes d’entrée / sortie d’un microcontrôleur.
Le bus SPI est capable de travailler en duplex et il est donc un très bon choix pour des
systèmes de transmission de données.
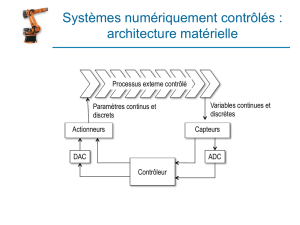
Le bus SPI n’a besoin que de 4 fils sur chaque circuit intégré :
- une horloge (SCLK)
- une entrée « Master Data Out / Slave Data Input » (MOSI)
- une sortie « Master Data Input / Slave Data Output » (MISO)
- un « chip select » aussi appelé « slave select » (SS).
Organisation Maître / Esclave du bus SPI 1
Dans le cas général, les données arrivent dans le périphérique quand l’horloge est basse et
sortent quand l’horloge est haute. Un périphérique pour communiquer doit avoir le chip-select
bas. Dans le cas contraire, la plupart des périphériques ont leur sortie avec une haute
impédance (désactivée). Tout cela permet à de nombreux appareils de communiquer avec un
écouteur unique. La fréquence de l’horloge peut varier de quelques kHz à quelques MHz.
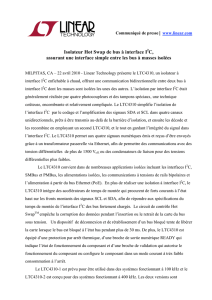
Quand il y a plusieurs périphériques esclaves, le périphérique maître possède plusieurs SS et
doit donc n’en activer qu’un seul à la fois.
Organisation Maître / Esclave du bus SPI 2
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%