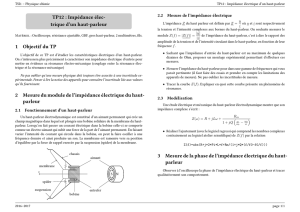
Montage de spécialité : Mesure d`impédance, Application à la

Montage de spécialité : Mesure d’impédance,
Application à la caractérisation d’un
Haut-Parleur
Nicolas Dandrimont
19 Novembre 2009
Table des matières
1 Introduction, prédéterminations 2
1.1 Notion d’impédance . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Haut-Parleur ............................. 2
2 Mesure d’impédance 4
2.1 Alimentation à courant constant . . . . . . . . . . . . . . . . . . 4
2.2 Mesure de l’impédance par tracé d’un diagramme de Bode . . . . 6
2.3 Détection synchrone . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.1 Principe............................ 6
2.3.2 Réalisation .......................... 7
3 Caractérisation du haut-parleur 7
3.1 Rappel du modèle du Haut-Parleur . . . . . . . . . . . . . . . . . 7
3.2 Caractérisation du Haut-Parleur utilisé . . . . . . . . . . . . . . . 8
A Impédance mesurée 9
Résumé
Ce montage porte sur une mesure fondamentale en électronique : la
mesure de l’impédance de dipôles linéaires. Pour illustrer cette mesure,
le sujet nous porte à effectuer la caractérisation d’un haut-parleur. Ceci
nécessite avant tout de réétablir le modèle électrique de ce dispositif élec-
tromécanique, afin d’en identifier les paramètres par la mesure.
1

1 Introduction, prédéterminations
Cette partie porte sur les principes à la base de ce montage que sont la notion
d’impédance et le modèle d’un haut-parleur.
1.1 Notion d’impédance
L’impédance n’a de sens que pour un dipole linéaire, ou que l’on peut
linéariser dans une certaine zone de fonctionnement.
Pour un dipôle traversé par un courant I(ω)(à la pulsation ω), est mesurée
à ses bornes une tension V(ω)complexe. On définit alors l’impédance comme
Z(ω) = V(ω)
I(ω)(1)
V(ω)
I(ω)
Figure 1 – Dipôle linéaire
On constate que la mesure de l’impédance du dipôle nécessite un « généra-
teur de courant » à fréquence variable, dont on connait parfaitement l’amplitude
du courant et la fréquence. Ceci permet, par mesure de la tension aux bornes du
dipôle, et du déphasage entre la tension et le courant, de déterminer totalement
l’impédance du dipôle à la fréquence donnée.
1.2 Haut-Parleur
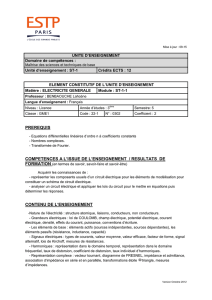
Un haut-parleur est un transducteur électromécanique consitué d’une mem-
brane, excitée par un aimant placé dans une bobine. Un champ magnétique
alternatif, créé par la bobine, fait vibrer la membrane afin d’émettre un son.
La problématique de cette partie est d’établir un modèle linéaire de ce dis-
positif à partir des équations électriques et mécaniques couplées.
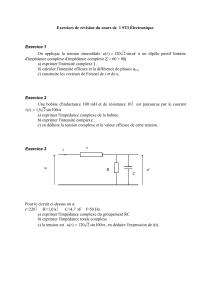
Dans ce modèle linéaire, il est considéré que l’ensemble { membrane + bobi-
nage }, de masse m, se déplace par rapport au support comme s’il subissait
une force de rappel de coefficient ket une force de frottements de coefficient
α. De plus, le bobinage subit un champ magnétique Buniforme et radial, donc
perpendiculaire au fil sur toute sa longueur l. (Schéma mécanique en figure 3,
électrique en figure 4).
Le principe fondamental de la dynamique s’écrit alors :
m¨x+α˙x
|{z}
Force de frottements
+kx
|{z}
Force de rappel
=−Bli
|{z}
Force de Laplace
(2)
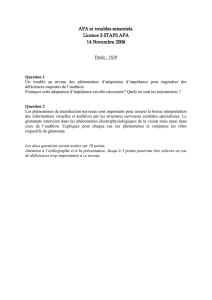
L’équation électrique, en considérant la résistance du bobinage Ret son
inductance propre L:
u=Ri +Ldi
dt−Bl ˙x(3)
2

Figure 2 – Haut parleur électrodynamique
Figure 3 – Haut parleur électrodynamique : schéma mécanique et notations
u(t)
i(t)
RL
e=−Bl dx
dt
Figure 4 – Haut parleur électrodynamique : schéma électrique
Dans l’espace de Laplace, ces deux équations donnent :
(mp2+αp +k)X(p) = −BlI(p)(4)
U(p)−(R+Lp)I(p) = −BlpX(p)(5)
3

On peut alors réinjecter l’équation 4 dans l’équation 5 afin d’établir les
grandeurs électriques équivalentes aux paramètres mécaniques : les grandeurs
motionnelles.
Z(ω) = R+jLω +jω(Bl)2
m(jω)2+jαω +k(6)
Le troisième terme est une impédance parallèle, que l’on appelle impédance
motionnelle du haut parleur. On peut alors établir un modèle électrique équiv-
alent complet en figure 5.
u(t)
i(t)
RL
RmLmCm
Figure 5 – Modèle équivalent électrique du haut-parleur
Les impédances motionnelles équivalentes ont alors pour expressions :
Rm=(Bl)2
α(7)
Lm=(Bl)2
k(8)
Cm=m
(Bl)2(9)
2 Mesure d’impédance
Cette partie porte sur l’étude du montage à proprement parler. Pour com-
mencer, nous étudions deux dispositifs de conversion tension-courant, puis en-
suite nous abordons les dispositifs permettant la mesure de l’impédance.
2.1 Alimentation à courant constant
Afin de générer un courant d’amplitude et de phase donnés à partir d’une
tension sinusoïdale, il est possible d’utiliserun montage nommé Amplificateur à
transimpédance et présenté en figure 6, nécessitant une résistance et un amplifi-
cateur opérationnel.
Le courant traversant la résistance Ret l’impédance à tester Zest le même.
De plus, la patte non-inverseuse de l’amplificateur à la masse nous donne une
masse virtuelle au point entre Ret Z.
On a donc
Vout(ω) = −Z(ω)
RVin(ω)(10)
Ce montage, bien qu’effectuant la fonction que nous souhaitons réaliser, a
un problème : Dans certaines applications, le dispositif à tester doit avoir une
patte à la masse (réelle).
4

Vin(ω)
R
I(ω)
Z(ω)
I(ω)
−
+
Vout(ω)
Figure 6 – Amplificateur à transimpédance
Nous proposons donc, pour pallier à ce problème, un deuxième montage un
peu plus complexe (en figure 7), à deux amplificateurs opérationnels.
R R
−
+
R
Vin(ω)R
−
+
Rc
I(ω)
Z(ω)Vout(ω)
Vout(ω)
Vs(ω)
Sommateur
Figure 7 – Convertisseur tension-courant
Le montage du sommateur, crée une tension Vs=Vin +Vout à sa sortie,
grâce au montage suiveur qui restitue la tension Vout. Le courant Itraversant
Rcet Z(ω)l’impédance à tester vaut donc
I=Vs−Vout
Rc
=Vin
Rc
.(11)
On en tire
Vout(ω) = Z(ω)I(ω) = Z(ω)
Rc
Vin(ω)(12)
La résistance Rcpermet de régler le calibre de l’appareil de mesure.
On en déduit finalement
Z(ω) = Rc
Vout
Vin
(13)
5
 6
7
8
9
6
7
8
9
1
/
9
100%