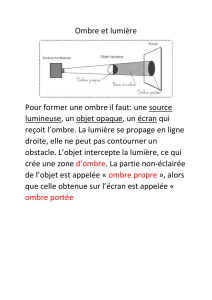
La synthèse d`images

II. Techniques d’ombrage
La synthèse d'images

Plan du cours
2
I. Retour sur le pipeline OpenGL
II. Techniques d’ombrage
A. La problématique des ombres
B. Ombrages discontinus temps réel
C. Ombrages continus
D. Ombrages et dynamique
III. Cas du moteur de rendu Halo 3
IV. Lancers de rayons et consort
V. Photon mapping
VI. Radiosité & PRT
VII. Simple diffusion & milieux participants

I. Techniques d’ombrage
A. La problématique des ombres
La synthèse d'images

Problématique des ombres
4
L’intérêt des ombres :
Positionnement relatif des objets entre eux
J.-M. Hasenfratz, M.
Lapierre, N. Holzschuch
and F. Sillion,
A Survey of Real-time Soft
Shadows Algorithms

Problématique des ombres
5
L’intérêt des ombres :
Positionnement relatif des objets entre eux … et par rapport à
la caméra !
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%