Quelques notions d`aérodynamique de base et leur calcul

Révision 1.3 – Copyright A. Deperrois - septembre 2009
Quelques notions d'aérodynamique de
base et leur calcul dans XFLR5
XFLR5

Révision 1.3 – Copyright A. Deperrois - septembre 2009
Sommaire
1. Rappel de quelques notions de base
a. Aérodynamiques
b. Propres à XFLR5
2. Aperçu sur le calcul des performances
3. Où l'on parle centrage, stabilité et test du piqué
4. Le cas particulier de la stabilité des ailes volantes

Révision 1.3 – Copyright A. Deperrois - septembre 2009
A quoi sert XFLR5 ?
D'abord à visualiser en 3D l'allure générale du
modèle : "Un bel avion vole bien"
Ensuite essentiellement à mieux comprendre les
phénomènes… Dixit Matthieu : "on pilote mieux quand
on comprend ce qui se passe"
A optimiser les performances aérodynamiques et à
étudier la stabilité

Révision 1.3 – Copyright A. Deperrois - septembre 2009
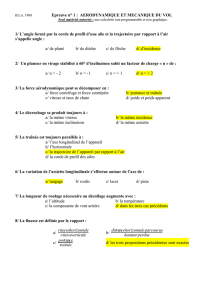
Que vaut XFLR5 ?
Qualitativement intéressant d'après les résultats en soufflerie de Matthieu & Co.
Lift curve
Measurement vs prediction - V=20m/s
-0.5
-0.25
0
0.25
0.5
0.75
1
1.25
-5 0 5 10
Alpha (deg)
CL
MSch
TPla
ADe
Jo&Stef
FMe
Measure V=20
Measure V=20
XFLR5 - v4.02
v4.00
(panneaux 3D)
v3.21
(VLM)
http://sailplane-matscherrer.blogspot.com/

Révision 1.3 – Copyright A. Deperrois - septembre 2009
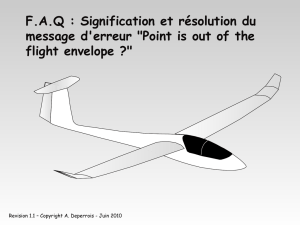
Que vaut XFLR5 ?
Lift curve
Measurement vs prediction - V=20m/s
-0.5
-0.25
0
0.25
0.5
0.75
1
1.25
0 0.025 0.05 0.075 0.1
CD
CL
MSch
TPla
ADe
Jo&Stef
FMe
V=20
V=20
V=20
v4.00
(Panneaux3D)
v3.21
(VLM)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
1
/
71
100%