Ressources pour faire la classe

Page 1
Physique - Chimie
Terminale Série S
Thème : Observer – Ondes et matière.
Type de ressources : Activités expérimentales.
Notions et contenus : Effet Doppler, erreurs incertitudes et notions associées.
Compétences travaillées ou évaluées :
Mettre en œuvre une démarche expérimentale pour mesurer une vitesse en utilisant l’effet
Doppler,
Exploiter l’expression du décalage Doppler de la fréquence dans le cas des faibles vitesses.
Identifier les différentes sources d’erreur lors d’une mesure : variabilités du phénomène et de
l’acte de mesure (facteurs liés à l’opérateur, aux instruments, etc.).
Nature de l’activité : Activité de découverte.
Résumé :
Ce document, conçu sous la forme de quatre activités indépendantes, traite de l’effet Doppler (ondes
sonores, ondes mécaniques à la surface de l’eau et ondes ultrasonores) :
Activité A : première approche et mise en évidence expérimentale de l’effet Doppler,
Activité B : exploitation du décalage Doppler de la fréquence pour la détermination de faibles
vitesses de déplacement dans le cas d’ondes à la surface de l’eau,
Activité C : calcul de vitesses par effet Doppler à partir de simulations,
Activité D : calcul de vitesses par effet Doppler avec des ondes ultrasonores pour déterminer
la vitesse d’un petit véhicule qui roule sur un plan incliné.
Mots clefs : Onde sonore, vitesse, fréquence, effet Doppler, interférences.
Académie où a été produite la ressource : Montpellier, http://sciences-physiques.ac-montpellier.fr

Page 2
Effet Doppler
Table des matières
1. Activité A : Découverte de l’effet Doppler ......................................................................................... 3
1. Son produit par une source en mouvement ................................................................................ 3
2. Ondes à la surface de l’eau ......................................................................................................... 3
3. Mesure de la variation de fréquence d’un son lorsque la source se déplace ............................. 3
Notes pour le professeur ...................................................................................................................... 4
2. Activité B : Ondes à la surface de l’eau et effet Doppler .................................................................. 6
1. Observation de l’effet Doppler à la surface de l’eau.................................................................... 6
2. Détermination de la vitesse de la source par décalage Doppler ................................................. 6
3. Détermination de la vitesse de la source par pointage ............................................................... 7
Notes pour le professeur ...................................................................................................................... 7
3. Activité C : Comprendre et utiliser l’effet Doppler ............................................................................ 9
1. Problème de la bande transporteuse .......................................................................................... 9
2. Le radar routier .......................................................................................................................... 11
3. Activités de prolongement ......................................................................................................... 12
Notes pour le professeur .................................................................................................................... 13
4. Activité D : Mesure d’une vitesse par effet Doppler avec des ultrasons ........................................ 15
1. Protocole expérimental .............................................................................................................. 15
2. Mesures et exploitation des résultats ........................................................................................ 15
Notes pour le professeur .................................................................................................................... 16
Conclusion : ......................................................................................................................................... 18
Annexe ................................................................................................................................................... 19

Page 3
1. Activité A : Découverte de l’effet Doppler
1. Son produit par une source en mouvement
Document sonore : Sons enregistrés depuis le bord de la piste d’une voiture de F1 lors d’une
compétition, d’un véhicule de police avec sa sirène…
Pistes audio : VoitureGP.wav, SirènePolice.wav
1
Question : Quelle est la particularité du son perçu par l’observateur immobile sur le bord de la
route ou de la piste ?
2. Ondes à la surface de l’eau
Base de réflexion : Cuve à ondes et source vibratoire en déplacement.
Figure 1 : Ondes à la surface d’un liquide lorsque la source se déplace.
Questions : Qu’observe-t-on ? Que peut-on dire des caractéristiques de l’onde?
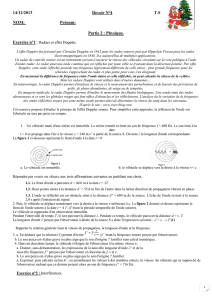
3. Mesure de la variation de fréquence d’un son lorsque la source se déplace
Base de travail :
- Animation de l’ONERA : http://www.onera.fr/lumiere/medias/doppler.swf
- Montage expérimental : Microphone et pendule sur lequel est fixé un haut parleur.
Figure 2 : Dispositif expérimental pour l’étude du décalage Doppler sonore.
1
Les pistes audio et les vidéos sont disponibles sur le site académique : http://webpeda.ac-montpellier.fr/spc/
48,0 cm
Microphone
Haut-parleur
GBF

Page 4
Questions :
1. Pendule immobile
Choisir une fréquence avec le GBF et faire une acquisition du signal sonore,
Déterminer à partir de l’enregistrement la valeur de la fréquence.
2. Pendule en mouvement
Faire une acquisition du signal sonore,
Montrer que la fréquence enregistrée par le microphone est différente selon que la
source sonore s’approche ou s’éloigne du micro.
Analyse / Bilan de l’activité :
Quelle est la caractéristique commune aux trois situations précédentes décrites dans les parties 1 à 3
de cette activité ?
Notes pour le professeur
Partie 1 : Son produit par une source en mouvement
Cas d’un observateur écoutant un véhicule arriver (Figure 3) :
On suppose qu’un observateur immobile est placé le long d’une route et qu’un véhicule arrive vers lui
à la vitesse constante v. La vitesse radiale du véhicule vr = v.cos(θ) varie au cours du mouvement
puisque l’angle θ varie. A l’approche du véhicule, l’observateur va donc percevoir, outre une variation
d’intensité sonore, une variation de fréquence due à la variation de la vitesse radiale. Quand le
véhicule est face à l’observateur (θ = π/2), la vitesse radiale est nulle et il perçoit le son du véhicule tel
qu’il entendrait ce véhicule s’il était immobile.
Figure 3 : Observateur fixe écoutant une source sonore en mouvement.
Partie 2 : Ondes à la surface de l’eau
La cuve à ondes permet d’illustrer de manière très visuelle l’effet Doppler, facilitant ainsi la
compréhension du phénomène par les élèves.
Partie 3 : Mesure de la variation de la fréquence du son lorsque la source se déplace
Pour illustrer le décalage Doppler, il faut analyser le signal enregistré dans plusieurs cas :
Lorsque la source sonore se rapproche du microphone (la fréquence du signal enregistré
est alors plus élevée),
Lorsque la source sonore est face au microphone (vitesse radiale nulle, pas de décalage
Doppler),
θ
Observateur fixe
Vitesse radiale
Véhicule en mouvement
Vitesse du véhicule

Page 5
Lorsque la source sonore s’éloigne du microphone (la fréquence du signal enregistré est
alors plus faible).
Figure 4 : Exemples de zones d'étude du son enregistré par le microphone
lorsque la source s’approche puis s’éloigne du microphone.
Une transformée de Fourier permet de déterminer facilement la fréquence du signal enregistré par le
microphone :
Figure 5 : Détermination de la fréquence du signal sonore enregistré
lorsque la source s'approche puis s'éloigne du microphone.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%