Mise en route du mouvement MOPAP2

Mise en route du mouvement MOPAP2
1. Lancer le PC T60- Ausaurus, à gauche sur le bureau.
2. Lancer go-to-gape.exe
3. Connecter le cordon("câble mopap2") sur le port série du pc Ausaurus.
4. Brancher l'alimentation du télescope(prise "Alimentation générale du
télescope") sur la prise murale du même nom.
5. La prise multiple au sol comporte 3 branchements vers le boîtier codeur,
l'alimentation grillagée 12v et la prise multiple (allumer son inter)fixée sur le
télescope qui elle, alimente les alimentation Audine.
6. Deux leds s'allument: rouge sur l'alimentation 12v métal grillagée et led rouge
sur boite noire d'alimentation du MOPOP2.
7. En face avant du boîtier noir mopap2 on trouve un connecteur din type1 (3
broches) .Il est destiné à recevoir le câble venant du détecteur de proximité à
être connecté sur cette prise PEC du ce boîtier noir.
8. Le mouvement est alors prêt à fonctionner.
9. Ne pas modifier l'afficheur des roues codeuses sur le boitier mopap2 qui
doivent rester réglées sur 479 pour un suivi sidéral.
10. Basculer l'inter du boîtier mopap2 sur ON: le moteur alpha se met en route.

11. Si L'inverseur du boîtier mopap2 marqué L/R est en position L(lent), une
pression sur le bouton ouest (rouge) de la raquette produit un mouvement de
rattrapage vers l'ouest. Une de pression sur le bouton Est (noir) de la raquette
produit un arrêt du moteur alpha et donc un rattrapage vers l'est.
12. Si l'inverseur est en position R (rapide), ces mêmes actions produisent des
mouvements plus rapides et en particulier la pression sur le bouton Est
inverse le sens du moteur alpha.
13. Ces mêmes mouvements peuvent être obtenus sur la raquette virtuelle du go-
to_gape.exe.

14. Le moteur delta doit aussi fonctionner.
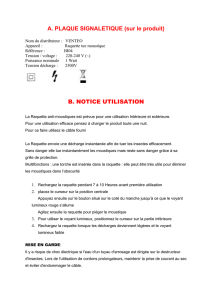
15. Avant toute chose aller vérifier que la roue dentée commandant le mouvement
delta est bien centrée entre les deux interrupteurs de fin de course.
(Image)
Si ce n'est pas le cas le recentrer avec la raquette.
(Image)
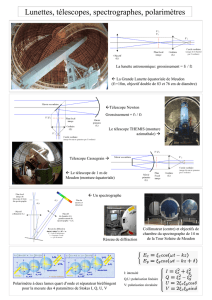
Ce mouvement delta motorisé est donc limité en amplitude. Tout grand
mouvement doit être fait à la main après débrayage du frein papillon.
Si l'un des interrupteurs de fin de course a été ouvert lors d'un mouvement
delta, la raquette devient inactive. Pour la réactiver il faut appuyer sur le
poussoir "réarmement del " près du moteur delta et appuyer simultanément
sur le bon poussoir delta de la raquette pour recentrer la roue dentée.
Mise en route des codeurs
1. Connecter le câble codeur sur le port série du PC: T60-3 (à droite sur le
bureau)

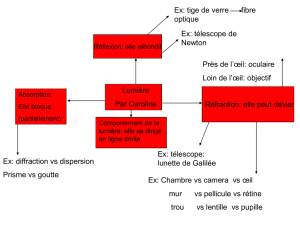
2. Alimenter les codeurs en actionnant l'inter sur la face gauche du boitier
codeurs situé dans la coupole.
(Image de l'inter)
Lancer PrismFR5.01.02 sur le PC T60-3.
Puis faire: Telescope/setup
Puis onglet Codeurs choisir le bouton:"Codeurs dans TELESCOPE.DLL"
OK.
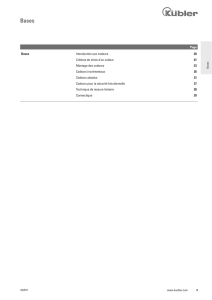
Puis, Télescope/Etablir communication.
Ce qui ouvre la fenêtre ci-dessous

Vérifier les paramètres et…OK
Faire OK sur les messages intermédiaires.
Ouvrir une carte du ciel si ce n'est déjà fait et cliquer droit …
Cliquer gauche sur "Réaligner les codeurs"
Le curseur jaune apparaît sur la carte,: il s'agit de la position du télescope.
Vérifier que les codeurs répondent en allant manœuvrer le télescope…le curseur doit
réagir dans les bonnes directions.
1
/
5
100%