Prototype pour l`investigations de la structuer verticale de la

Prototype pour ėtablir un profil vertical de puissance rétrodiffusée d'ondes
ultrasonores de la zone de transition entre l'écoulement et le dépôt dans un
collecteur d’assainissement
Contexte
Avec des concentrations moyennes dans une section ne dépassant pas quelques décigrammes
par litre, les eaux résiduaires urbaines sont des suspensions très diluées si on les compare aux
fluides de procédés industriels ou aux rivières en crue Ces suspensions n’en représentent pas
moins une part importante de la charge en matière organique et en contaminants associés.
Différentes études à travers le monde montrent que les effluents urbains contribuent fortement
à la dégradation de la qualité des milieux aquatiques mais la dynamique des contaminants
contenus dans les eaux résiduaires urbaines est encore mal connue. En effet de nombreux
contaminants sont associés à une phase particulaire organique, dont le transport dans les
systèmes de collecte est déterminé par des phénomènes complexes. Certains expérimentateurs
ont observé l’existence d’une couche fortement organique située à la surface des sédiments
plus grossiers, et l’apparition de phénomènes d’arrachage localisés lors d’augmentation du
cisaillement pariétal suite à une augmentation de débit.
La modélisation de la dynamique des flux polluants transportés et potentiellement rejetés par
les systèmes d’assainissement passe donc par une meilleure représentation des phénomènes de
dynamique sédimentaire, qui elle même doit s’appuyer sur des observations et
expérimentations in situ à la fois de l’hydrodynamique et de la phase particulaire.
Des travaux récents à l’aide d’un sonar spécialement adapté ont permis d’obtenir sur un site
pilote une première vision de la nature et de la morphologie dans le plan horizontal de
l’interface eau-sédiment et leurs variations en fonction du contexte hydraulique.
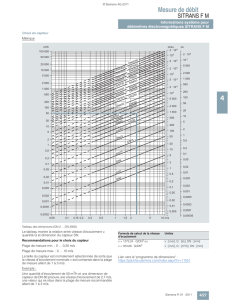
Le prototype faisant l’objet de cette consultation doit fournir de nouveaux moyens
d’investigation ciblés sur l’interface eau-sédiment. Selon la configuration des sites cette
interface peut correspondre à une variation brutale ou progressive des concentrations et des
vitesses entre l'écoulement d'eau usée et la couche de sédiment consolidée et immobile (cf
fig.1), et dans le cas d’une transition progressive celle-ci peut s’effectuer sur une distance
verticale de quelques centimètres voire quelques décimètres. On se propose d’investiguer la
zône de transition progressive si elle existe, et les premiers centimètres de la couche
organique.

Figure n°1 : Profils verticaux de la concentration et de la vitesse dans la partie inférieure
d’un écoulement d’eaux usées en présence de dépôts
Objectif
L’objectif général est de mieux connaitre, à l’échelle d’un tronçon de collecteur de quelques
dizaines de mètres, la répartition verticale et la dynamique de la phase particulaire des
effluents urbains, en relation avec celle de la phase porteuse. Cette connaissance est
nécessaire pour une interprétation à plus grande échelle en termes de flux de contaminants.
Dans le cadre de ce prototype, l’échantillonnage spatial dans les directions horizontales est
limité à un point, l’accent étant mis sur le suivi temporel de la structure verticale de la
transition écoulement/dépôt. On se propose donc :
a) de vérifier s’il existe, dans certaines conditions hydrodynamiques une zone de transition
progressive entre une fraction sédimentée immobile et une fraction transportée en suspension
à la même vitesse que l’eau,
b) de préciser ces conditions hydrodynamiques en termes de paramètres locaux (contrainte de
cisaillement, énergie cinétique turbulente…), et le cas échéant d’appréhender l’influence en
retour de cette zone sur les valeurs de ces paramètres,
c) préciser la dynamique de cette zone en termes d’échanges avec la veine liquide.
L’objet de cette consultation est
Spécifications
Il s’agit de fournir un capteur fournissant un profil de puissance rétrodiffusée d’une onde
ultrasonore dans la zone de transition décrite plus haut. Les caractéristiques de cette zone sont
encore mal connues, mais il s’agit essentiellement de suspensions comportant 50 à 80 % de
matières organiques, avec des concentrations variant entre 1 et 20g/L, animées par des
vitesses horizontales inférieures à 0,10 m/s. L’épaisseur de cette zone de transition peut
atteindre 10 à 20 cm voire davantage, mais on cherche à obtenir un profil de réflectivité
couche organique
dépôt consolidé
Ecoulement d’eau usée
zone de transition

intégrant au moins 20 cm d’écoulement au dessus de cette zone et si possible quelques
centimètres de la zone sédimentée immobile en dessus de cette zone.
En pratique la profondeur d’investigation dépendra de la concentration, et on peut se fixer
pour objectif d’atteindre une concentration de 10g/L. Un balayage en fréquence sur une large
gamme pourra être nécessaire pour optimiser le couple résolution spatiale /pénétration/
diamètre de la zone d’investigation.
Le capteur doit être installé (avec d’autres capteurs) sur un porte-instrument maintenu à la
surface de l’écoulement en un point variable en altitude mais fixe en projection horizontale,.
La charge utile disponible sur ce porte-instrument est de 1,5 kg. L’encombrement du capteur
devra inscrit dans un volume Lxlxh = 100cm x30cm x10cm. Le capteur pourra les cas échéant
être complété par un boitier d’alimentation, commande, enregistrement. Ce boitier pourra être
déporté du capteur d’une distance d’au moins 10 m.
Le niveau d’eau est susceptible de varier 20 à 250 cm par rapport au sommet de la zone de
transition investiguée (définie par une concentration de 1 g/L), et la vitesse de l’écoulement
pourra varier entre 20 et 80 cm/s.
Le profil de réflectivité sera mesuré avec une résolution spatiale de l’ordre du cm, une
précision du repérage spatial du même ordre, et permettra de distinguer des différences de
concentration de l’ordre de 0,5g/ L. Il sera disponible en temps réel, et sera enregistré en local
(logger) avec une fréquence réglable de 1 mn à 1 jour, et une capacité de 10 000
enregistrements.
La zone d’investigation sera positionnée à l’aplomb du porte instrument, avec une extension
variable avec la hauteur d’eau mais ne dépassant pas 200 cm2 (ou un cercle de 15 cm de
diamètre) pour une hauteur d’eau inférieure à 1,5 m au dessus du niveau de référence à 1g/L.
Le capteur ou son boitier de commande seront alimentés en TBTS (48V alternatif ou 60 V
continu). Le capteur sera conditionné dans une enveloppe d’étanchéité IP68, et le boitier de
commande éventuel IP65. Les parties en contact avec l’eau devront être protégées contre la
corrosion (effluents acides ou basiques), contre l’accumulation de graisses et contre le fouling
d’origine biologique, et ne nécessiteront qu’un nettoyage bimensuel pour être opérationnel à
95% sur une base de temps de 5mn.
Le capteur fera l’objet d’essais sur plusieurs périodes de quelques semaines sur le réseau
d’assainissement de Nantes Metropole. Ces périodes seront assujetties aux possibilités
d’intervention en réseau définies par Nantes Metropole, et les résultats obtenus feront l’objet
d’une analyse conjointe entre le fournisseur et le maître d’ouvrage.
Les spécifications seront susceptibles d’évoluer en fonction des résultats obtenus lors des
essais successifs et le prototype proposé devra présenter une souplesse suffisante pour
s’adapter à ces évolutions avant d’être packagé sous sa forme finalisée.
L’offre devra comporter la fourniture d’un logiciel convivial de paramétrage des conditions
de mesure et d’acquisition du capteur, et de transfert des données enregistrées localement vers
un PC portable Windows. Elle comportera également une formation d’une journée minimum
sur l’utilisation du capteur et du logiciel.
1
/
3
100%