1 - Free

840911610 Imprimé le 17/04/2017
BACCALAUREAT STI GENIE ELECTRONIQUE
Epreuve de Construction Electronique Session 2007
Dossier Technique
LE DÔME DE VIDEO SURVEILLANCE

Dôme de Vidéo Surveillance
Dossier Technique
Thème de Bac Génie Electronique 2007 2/60
SOMMAIRE
1 Présentation et Mise en situation du système ...................................................................................................4
1.1 Présentation .............................................................................................................................................. 4
1.2 Mise en situation ....................................................................................................................................... 4
1.3 Environnement du système technique limité à 2 dômes de surveillance .................................................. 5
1.3.1 Diagramme Sagittal ......................................................................................................................... 5
1.3.2 Liaisons du diagramme sagittal ....................................................................................................... 5
2 Présentation de l’objet technique : dôme VIC1500..........................................................................................6
2.1 Fonction globale ....................................................................................................................................... 6
2.2 Schéma fonctionnel de niveau 1 ............................................................................................................... 6
2.3 Fonction d’usage ....................................................................................................................................... 6
2.4 Schéma fonctionnel de niveau 2 ............................................................................................................... 6
2.5 Etude partielle des milieux associés au système ....................................................................................... 6
2.5.1 Milieu humain ................................................................................................................................. 6
2.5.2 Milieu technique .............................................................................................................................. 6
2.5.3 Milieu physique ............................................................................................................................... 7
2.5.4 Milieu économique .......................................................................................................................... 7
2.6 Caractéristiques de l’Objet Technique « Dôme de vidéo surveillance VIC1500 » ................................... 8
2.6.1 Précisions préliminaires sur la conception mécanique d'un dôme ................................................... 8
2.6.2 Définitions ....................................................................................................................................... 8
2.6.3 Caractéristiques techniques principales du dôme VIC1500 (extraites de la Documentation
Constructeur) ................................................................................................................................................... 9
2.6.4 Connectiques et signaux électriques du dôme VIC1500 ................................................................. 9
2.6.5 Câblage du dôme VIC1500 ........................................................................................................... 10
2.6.6 Mouvements et motorisation d’un dôme ....................................................................................... 10
3 Descriptif du dôme de surveillance didactisé ................................................................................................. 11
3.1 Schéma général de câblage du projet didactisé ....................................................................................... 11
3.2 Définition des zones géographiques du projet didactisé ......................................................................... 12
3.3 Définition des commandes « clavier » du projet didactisé ..................................................................... 12
4 Etude Fonctionnelle de premier degré ........................................................................................................... 13
4.1 Schéma fonctionnel de degré 1 ............................................................................................................... 13
4.2 Etude de FP1 : « Acquisition consignes, Affichage et Informations visuelles et sonores» .................... 13
4.3 Etude de FP2 : « Traitement des Informations et Pilotage de l’Actionneur » ......................................... 14
4.4 Etude de FP3 : « Détection Position de référence » ................................................................................ 14
4.5 Etude de FP4 : « Traitement Vidéo » ...................................................................................................... 15
4.6 Etude de FP5 : « Prise de Vue » ............................................................................................................. 15
4.7 Etude de FP6 : « Visualisation » ............................................................................................................. 15
4.8 Etude de FP7 : « Orientation de la caméra » ........................................................................................... 16
4.9 Etude de FP8 : « Détection et Traitement Luminosité» .......................................................................... 16
5 Etude Fonctionnelle de SECOND degré ........................................................................................................ 17
5.1 Etude fonctionnelle de second degré de FP1« Acquisition consignes, Affichage et Informations
visuelles et sonores» .......................................................................................................................................... 17
5.1.1 Schéma fonctionnel de second degré de FP1 ................................................................................ 17
5.1.2 Etude de FS11 : Codage Consignes (Clavier 12 touches) ............................................................. 17
5.1.3 Etude de FS12 : Traitement Consignes ......................................................................................... 18
5.1.4 Etude de FS13 : Adapter les niveaux ............................................................................................ 23
5.1.5 Etude de FS14 : Conversion Electrique/Sonore ............................................................................ 23
5.1.6 Etude de FS15 : Conversion Electrique/Lumineuse ...................................................................... 23
5.1.7 Etude de FS16 : Conversion Electrique/Lumineuse ...................................................................... 23
5.2 Etude fonctionnelle de second degré de FP2 : « Traitement des informations et pilotage de
l’actionneur » .................................................................................................................................................... 25
5.2.1 Schéma fonctionnel de second degré de FP2 ................................................................................ 25
5.2.2 Etude de FS21 : Adapter les niveaux ............................................................................................ 25
5.2.3 Etude de FS22 : Conversion série/parallèle ................................................................................... 25
5.2.4 Etude de FS23 : Traitement consigne ............................................................................................ 26
5.2.5 Etude de FS24 : Pilotage du Moteur Pas à Pas .............................................................................. 27
5.2.6 Algorigrammes de fonctionnement ............................................................................................... 30
5.3 Etude fonctionnelle de second degré de FP3 : « Détection Position de référence » ............................... 33
5.3.1 Schéma fonctionnel de second degré de FP3 ................................................................................ 33
5.3.2 Etude de FS31 : Conversion Energie Electrique/Lumineuse ........................................................ 33

Dôme de Vidéo Surveillance
Dossier Technique
Thème de Bac Génie Electronique 2007 3/60
5.3.3 Etude de FS32 : Filtrer .................................................................................................................. 33
5.3.4 Etude de FS33 : Conversion Energie Lumineuse / Electrique ...................................................... 33
5.4 Etude fonctionnelle de second degré de FP4 : « Orientation de la caméra » .......................................... 35
5.4.1 Schéma fonctionnel de second degré de FP4 ................................................................................ 35
5.4.2 Etude de FS41 : Adaptation d’impédance Vidéo .......................................................................... 35
5.4.3 Etude de FS42 : Détection Synchronisation .................................................................................. 35
5.4.4 Etude de FS43 : Calibrer Durée Image.......................................................................................... 36
5.4.5 Etude de FS44 : Traitement Masquage Vidéo ............................................................................... 37
5.4.6 Etude de FS45 : Masquage ............................................................................................................ 39
5.4.7 Etude de FS46 : Elaboration Niveau de Gris ................................................................................. 39
5.4.8 Etude de FS47 : Elaboration Signal Vidéo .................................................................................... 40
5.5 Etude fonctionnelle de second degré de FP7 : « Orientation de la caméra » .......................................... 41
5.5.1 Schéma fonctionnel de second degré de FP7 ................................................................................ 41
5.5.2 Etude de FS71 : Contrôler et Réguler ........................................................................................... 41
5.5.3 Etude de FS72 : Interfacer en puissance........................................................................................ 41
5.5.4 Etude de FS73 : Motorisation pas à pas ........................................................................................ 42
6 Schémas Structurels, PCB et Nomenclatures ................................................................................................. 43
6.1 Carte « Télécommande » (FP1) .............................................................................................................. 43
6.1.1 Schéma structurel .......................................................................................................................... 43
6.1.2 Schéma d’implantation des composants ........................................................................................ 43
6.1.3 Nomenclature ................................................................................................................................ 44
6.2 Carte Mère « Traitement » (FP2) ............................................................................................................ 45
6.2.1 Schéma structurel .......................................................................................................................... 45
6.2.2 Schéma d’implantation des composants ........................................................................................ 46
6.2.3 Nomenclature ................................................................................................................................ 46
6.3 Carte « Puissance » (FP3 et FP7) ............................................................................................................ 47
6.3.1 Schéma structurel .......................................................................................................................... 47
6.3.2 Schéma d’implantation des composants ........................................................................................ 48
6.3.3 Nomenclature ................................................................................................................................ 48
6.4 Carte « Traitement Vidéo » (FP4) .......................................................................................................... 49
6.4.1 Schéma structurel .......................................................................................................................... 49
6.4.2 Schéma d’implantation des composants ........................................................................................ 49
6.4.3 Nomenclature ................................................................................................................................ 50
7 Programmes ................................................................................................................................................... 51
7.1 Programme de FP1 ................................................................................................................................. 51
7.2 Programme de FP2 et FS44 .................................................................................................................... 55

Dôme de Vidéo Surveillance
Dossier Technique
Thème de Bac Génie Electronique 2007 4/60
1 PRESENTATION ET MISE EN SITUATION DU SYSTEME
1.1 Présentation
Le rôle d'une installation de vidéosurveillance est de permettre l'observation de lieux ou de personnes, à distance,
dans un souci de sécurité généralement.
La tourelle ou dôme de vidéosurveillance (en extérieur), se présente sous la forme d'un lampadaire fixé en haut
d'un pylône.
Elle permet très simplement et en toute sécurité à un opérateur confortablement installé devant son écran vidéo
d'assurer la surveillance d'un ou plusieurs sites.
Les applications typiques sont:
- Observation du comportement des supporters dans les tribunes d'un stade
- Contrôle des accès dans un bâtiment ou ensemble de bâtiments industriels en dehors des heures
d'activités
- Contrôle du trafic routier
- Prévention des actes de délinquance dans les rues d'une commune
L'opérateur peut piloter à distance l'appareil à l'aide d'un pupitre de commande ou d’un ordinateur, il peut ainsi
zoomer, cadrer ou régler l'image aux moyens d'une simple manette "joystick" et du clavier.
La tourelle peut aussi être programmée pour :
- Effectuer une ronde sur des prépositions sélectionnées
- Activer une préposition sur l'apparition d'une alarme de l'une des quatre entrées d'alarme
- Masquer les zones privatives par une incrustation programmable d'une ou plusieurs zones grisées
conformément à la loi du 21 janvier 1995 (voir image ci-dessous)
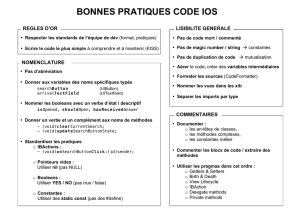
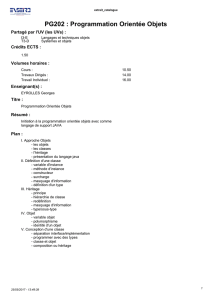
1.2 Mise en situation
Figure 1. Mise en situation du système de vidéo surveillance
Un opérateur se trouve une salle de contrôle dans laquelle on peut trouver :
- Un ou plusieurs pupitres de commande ainsi que des moniteurs couleur de visualisation, à la disposition
des opérateurs
Logiciel de Télécommande
(Mardel Image)
Dôme Vidéo
VIC 1500
Signaux Vidéo
Commandes
Dôme(s)
Moniteurs de visualisation
Pupitre de
commande

Dôme de Vidéo Surveillance
Dossier Technique
Thème de Bac Génie Electronique 2007 5/60
- Des équipements de prise de vues en nombre variable sur le site éloigné à surveiller: ce sont les
éléments actifs de cette installation. Une installation disposant jusqu’à 99 dômes est envisageable.
Ces équipements de prise de vues sont situés dans des pièces ou à l'extérieur des bâtiments, souvent installés en
hauteur afin d'assurer une bonne couverture de zone et de protection contre le vandalisme
- Les câbles d'alimentation électrique (non représentés sur l'illustration)
- Les câbles nécessaires au transport du signal vidéo entre ces équipements et les moniteurs de
visualisation
- Un câble de télécommande reliant un pupitre ou un ordinateur à un ou plusieurs équipements
L'étude de ce système technique gravitera autour de l'élément "dôme de vidéosurveillance orientable" et il est
important de disposer d'un agrandissement d'image variable pour l'adapter à la situation.
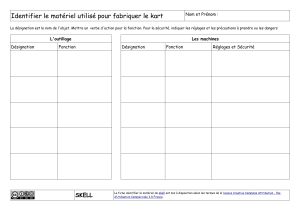
1.3 Environnement du système technique limité à 2 dômes de surveillance
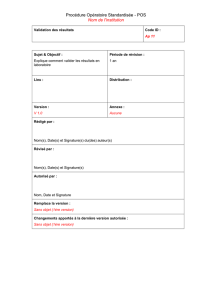
1.3.1 Diagramme Sagittal
Dôme
Orientable N°2
Dôme
Orientable N°1
Moniteur
N°1
Moniteur
N°2
Pupitre de
Commande
Consignes
Signal Vidéo 2
Environnement
1
Image Captée N°1
Luminosité
ambiante N°2
Luminosité
ambiante N°1
Compte Rendu
Commandes Codées
Environnement
2
Image Captée N°2
Alarme N°1
Alarme N°2
Utilisateur
Positions
Image zone 1
Image zone 2
Signal Vidéo 1
Eclairage IR 1
Eclairage IR 2
Alarme
Signal
Alarme 1
Alarme
Signal
Alarme 2
Figure 2. Diagramme Sagittal
1.3.2 Liaisons du diagramme sagittal
Image captée 1,2: Image des objets ou individus visés par la caméra, limitée à son champ de vision.
Signal vidéo 1,2: Signal électrique complexe, représentatif de l'image captée par la caméra, et exploitable par le
moniteur de visualisation au standard PAL.
Commandes codées : Information numérique sérialisée, codée selon le protocole ERNA (voir document
ressource Protocole officiel ERNA) et au format de la norme EIA/RS422
Compte rendu: Informations numériques sérialisées indiquant les coordonnées du point observé (Azimut, Site
et Zoom), au format de la norme EIA/RS422 et codée selon un protocole différent du précédent.
Consignes: Valeurs numériques de position entrées par l'opérateur au moyen d'un clavier, ou d’un joystick, des
touches de zoom et focus.
Positions: Valeurs numériques de position AZIMUT, SITE et ZOOM en pas et degré.
Image zone choisie 1 et 2: Image observable sur le moniteur de la zone sélectionnée.
Alarme 1 et 2: Capteur permettant la détection d ‘une effration
Signal Alarme 1 et 2: Signal électrique indiquant une présence ou mouvement (en cas d'effraction détectée sur
l'une des entrées d'alarmes associées à chaque dôme, une information directe arrive et dirige automatiquement le
bloc caméra vers la zone prédéfinie).
Luminosité ambiante 1 et 2: Information sur la luminosité ambiante (détection Jour/Nuit optionnelle sur le
dôme VIC1500)
Eclairage IR 1 et 2: Signaux lumineux infra rouge pour une vision nocturne
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
1
/
60
100%