Le laser en tant qu`outil d`investigation

Comprendre – Lois et modèles / Energie matière et rayonnement / Transferts quantiques d’énergie
- TP 24-
Le Laser en tant qu’outil d’investigation
PROPRIETES GENERALES D’UNE EMISSION LASER
Directivité
Les sources lumineuses ordinaires produisent de la lumière où les différentes ondes lumineuses se déplacent dans toutes les
directions à partir de la source. Le faisceau laser se comporte pratiquement comme un faisceau cylindrique. Il est très
légèrement divergent, le diamètre du faisceau est de l'ordre du mm à la sortie du laser et du cm 10 mètres plus loin. L'angle
α
de divergence du faisceau est dû à la diffraction à la sortie du système optique. Cette très grande directivité des faisceaux lasers
explique qu'ils peuvent garder leur précision sur de grandes distances. On dit qu’un faisceau laser est unidirectionnel.
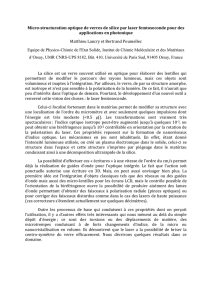
Monochromaticité
Alors que la lumière ordinaire est constituée de plusieurs longueurs d’onde, le
spectre de la lumière émise par un laser ne comporte qu'une seule raie,
caractéristique du type de laser utilisé, avec une très faible largueur spectrale. La
lumière issue d’un laser est quasiment monochromatique. Il existe des émetteurs-
laser de différentes longueur d’onde.
(Image : Spectre d’une diode laser)
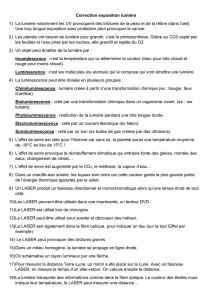
Cohérence temporelle
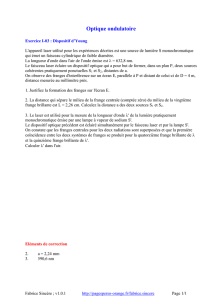
La cohérence temporelle du faisceau laser, aussi appelée cohérence longitudinale, décrit la durée
d’un train d’onde. La lumière émise par les sources lumineuses classiques est constituée d’une
multitude de trains d’onde très courts dans le temps. Dans le cas d’un faisceau laser, un même train
d’onde peut s’étendre sur plusieurs dizaines de centimètres. Les vibrations ainsi reçues par
l’observateur appartiennent, pour un temps très long par rapport à la période de l’onde, à la même
onde.
(Image : En a = onde non-cohérente temporellement En b = onde cohérente temporellement)
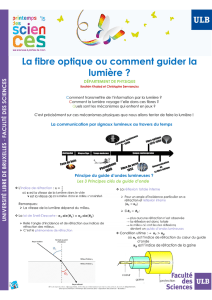
Cohérence spatiale
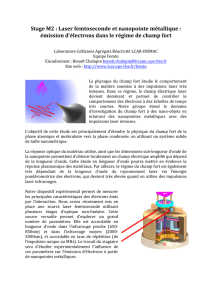
La cohérence spatiale du faisceau laser, aussi appelée cohérence transversale, est liée à la faible
dimension de la source qui est quasi-ponctuelle et à la faible divergence du faisceau. Des points situés perpendiculairement à la
direction de propagation d'un faisceau laser, à une certaine distance l'un de l'autre, sont en phase.
(Image : En a= onde non-cohérente temporellement et spatialement En b=onde cohérente temporellement et
spatialement)

Partie A : Mesurer une distance à l’aide d’un laser.
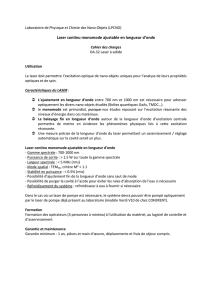
Triangulation laser
La triangulation, c'est mesurer la distance par calcul angulaire. En métrologie, un Capteur projette un point laser sur un Objet à
mesurer. La lumière réfléchie atteint sous un angle certain un élément Récepteur, en fonction de la distance. La distance par
rapport à l'objet de mesure est calculée dans le Capteur à partir de la position du point lumineux sur l'élément Récepteur et à
partir de la distance séparant l'émetteur du Récepteur.
http://www.micro-epsilon.fr/glossar/Laser-Triangulation.html
Objectif de l’expérience réalisée au labo
Mesurer par la méthode de triangulation la distance entre la paillasse et le sol de la salle.
Adaptation du montage et expérimentation
À l'aide d'une webcam et d'un pointeur laser, on conçoit un système de mesure de distance en repérant la position du spot laser
dans le champ de vision de la caméra. Au préalable, il faudra étalonner notre système.
Matériel:
webcam ; ordinateur et logiciel Généris
règle
potence de mécanique pour fixer le pointeur et la caméra (ne pas modifier le réglage de l’ensemble)
rail optique (pour mesurer la distance à la cible)
Description du montage:
On place sur un banc optique un écran blanc. À une extrémité du banc, on dispose, dans l'axe du rail optique, un laser rouge. À
coté du laser, une webcam filme l'écran (où on voit un spot rouge). L'écran sera visible depuis la webcam sur toute la longueur
du rail. Sur l'écran de l'ordinateur, on visualise en plein écran le champ filmé par la caméra. On mesure depuis le bord gauche
de l'écran la position du spot laser en nombre de pixel,
La distance x entre le spot et la bordure de l’écran varie en fonction de l’angle ; la mesure de x suffit pour déterminer D sans
calcul de l’angle.

Principe de la méthode
La relation entre la distance D et la distance x n’est pas une relation mathématique simple, il faut donc au préalable tracer une
courbe d’étalonnage reliant D et x. Puis à partir de cette courbe, estimer la distance recherchée.
Réalisation
Pour tracer la courbe, prendre des distances D comprises entre 30 cm et 2 m.
Réaliser une vidéo des différentes positions de l’écran en repérant clairement la distance D.
Réglage de la webcam :
diminuer la luminosité pour que le spot soit bien visible sur l’écran
régler sur 15 images par seconde
Pour mesurer x en pixel, il faut ouvrir la vidéo réalisée dans l’onglet « traitement manuel » ; la valeur de la distance x ,par
rapport au bord de l’image, en pixel est indiquée dans le cadre « Coordonnées ».
Exploitation
Tracer la courbe d’étalonnage sur papier millimétré.
Faire la mesure de la distance demandée.
Réfléchir aux causes d’erreurs possibles.
Partie B Réalisation d’un prototype de contrôleur optique de fréquence de
rotation d’un moteur
Matériel à disposition
- Moteur 6V à courant continu
- Emetteur laser Caractéristiques techniques : Longueur d'onde : 661 nm (rouge)
Puissance : 1 mW (classe II) Diamètre du rayon (à 5 m) : 8 mm Réglage fin
vertical : ± 3° Largeur spectrale
λΔ
= 2.10-12 m. Section du faisceau à la sortie
de l’émetteur: r = 0,4 mm
- Récepteur FIBROPTONIC Caractéristiques techniques : Alimentation externe
continue (10V max) / Bornes de connexion à appareil de visualisation du signal
(oscilloscope, interface, …) / Photorécepteur (courbe de réponse spectrale
jointe) / Diode-témoin verte de bonne réception du signal lumineux / Haut-parleur
de puissance réglable
- Alimentation continue 0-10V
- Alimentation continue -5V - +5V
- Interface d’acquisition
- Supports élévateurs
- Fils de connexion
- Stroboscope
a- Analyse des performances du matériel à disposition
Compte-tenu de certaines propriétés de l’émission laser et des caractéristiques techniques du matériel à disposition :
- justifiez l’adéquation satisfaisante à priori de l’émetteur et du récepteur optique.
- indiquez ce qui est de nature à réduire à priori les performances de la réception du signal lumineux et
comment y remédier
- Vérifiez expérimentalement à l’ordinateur l’adéquation satisfaisante entre l’émetteur et le récepteur optiques.
b- Mise en place du matériel
Compte-tenu des performances de l’émetteur et du récepteur optiques, mettre en place le matériel dans le but de
déterminer à l’ordinateur la fréquence de rotation du moteur électrique
Conseils de configuration de Generis :
- Durée d’acquisition suggérée et à modifier si nécessaire: 500 ms
- Nombre de points : 5001
- Mettre éventuellement en acquisition continue
c- Mesure et contrôle de la valeur obtenue
- Donnez la fréquence de rotation du moteur mesurée à l’ordinateur.
- Vérifiez la valeur obtenue en la comparant à celle mesurée au stroboscope
- Déterminez l’écart relatif entre la valeur de fréquence obtenue au moyen du prototype de contrôleur et celle obtenue
au stroboscope.
d- Démontage et rangement du mangement
Ana 2
Ana 3
Réa 3
Réa 4
Réa 3
Réa 5
Réa 6
Val 1
1
/
3
100%