Moteur a courant continu - Site de cours en électrotechnique

Page 1 sur 23
COURS N° 3 : Moteur à courant
continu
DÉROULEMENT DE LA SÉANCE
TITRE
ACTIVITÉS PROF
ACTIVITÉS ÉLÈVES
DURÉE
FIN DU COURS {? heures}

Page 2 sur 23
Tableau de comité de lecture
Date de lecture
Lecteurs
Observation
Remarques rédacteur
Date modifications
13 octobre 2000
Première Version
13 octobre 2000
21 mai 2011
CROCHET David
Mise à jour des données de cette page (mail et adresse)
21 mai 2001
Quote of my life :
Fournir ma contribution aux autres est ma philosophie.
Et la vôtre ?
Si vous avez lu ce T.P. et que vous avez des remarques à faire, n'hésiter pas et écrivez-moi à l'adresse suivante :
Ce dossier contient :
Un dossier élève (pages 4 à 13)
Un dossier prof (pages 14 à 23)
Un transparent (page - à -)
E-Mail :
Crochet.david@free.fr
Adresse Professionnel :
CROCHET David
Professeur de Génie électrique
Lycée Jean GUEHENNO
Rue pierre Huet
61105 FLERS
(Adresse valable jusqu'au 30/06/2004)

Page 3 sur 23
COURS N° 3
Moteur à courant continu
Niveau : 1 STI GET
Lieu : Salle de cours
Durée : ? heures
Organisation : Classe entière
LIAISON AU RÉFÉRENTIEL
PRÉ-REQUIS
Les élèves doivent être capables :
-
OBJECTIFS
Les élèves devront être capables de :
-
NIVEAU D'APPRENTISSAGE
MÉTHODE
- Passive

Page 4 sur 23
S.T.I. - G.E.T.
B 2 – ÉLECTROTECHNIQUE
COURS
N° 3
LES MOTEURS
DOSSIER PÉDAGOGIQUE
M
Mo
ot
te
eu
ur
r
à
à
C
Co
ou
ur
ra
an
nt
t
C
Co
on
nt
ti
in
nu
u
Objectif :
Documents :
Secteur : Salle de cours Durée : ? heures

Page 5 sur 23
Le Moteur à Courant Continu
Les machines à courant continu sont réversibles : de moteurs, elles peuvent
devenir génératrices sont peu utilisées ; en revanche, les moteurs sont très employés
dans les domaines qui nécessitent une vitesse variable, dans la traction électrique et le
levage. Par exemple, sur les T.G.V. Paris – Lyon, chaque rame (motrice avant –
wagons passagers – motrice arrière) comporte 12 moteurs CC des 525 kW, tension
max. de 1000 V et courant max. de 1000 A.
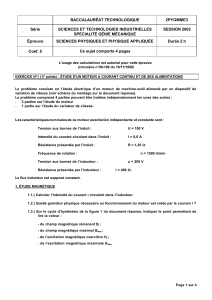
1. Rappel de physique
Lorsqu'un conducteur se déplace dans
un champ magnétique, il est le siège
d'un f.e.m. (force électromotrice)
induite.
Un conducteur parcouru par un
courant et soumis à l'action d'un
champ magnétique, subit une force
e = B L v (Loi de LENZ)
F = B I L (Loi de LAPLACE)
e : f.e.m. [V]
B : Champ magnétique [T]
L : Longueur du conducteur [m]
v : Vitesse de déplacement [m.s-1]
F : Force [N]
B : Champ magnétique [T]
I : Intensité [A]
L : Longueur du conducteur [m]
Pour trouver le sens de la f.e.m., on applique la rège les trois doigts de la main gauche
(générateur). Dans le cas du moteur, la règle s'applique sur la main droite.
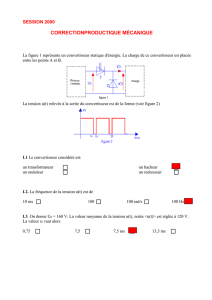
1.1. Principe de fonctionnement
- Lorsque les inducteurs sont alimentés, ils créent un champ magnétique dans
l'entrefer.
- Quand l'induit est alimenté, ses conducteurs situés sous un même pôle sont
parcourus par des courants de même sens et sont soumis à une force (loi de
Laplace).
V
N
V
S
E
N
F
S
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%