Les méthodes gravimétriques

1
Master Professionnel CIS jean-Pierre Fourno
Les méthodes électromagnétiques
I.- Introduction
Par opposition aux méthodes électriques, les méthodes électromagnétiques
mesurent directement le champ magnétique associé au flux de courant dans le
sous-sol.
Lorsque les régions de résistivité électrique anormales sont très locales, il est plus
instructif de mesurer le champ magnétique associé à un courant électrique plutôt
que de mesurer la distribution de courant dans le sous-sol à l'aide d'électrodes de
potentiel.
Lorsqu'un champ électromagnétique alternatif, qui est causé par un courant
alternatif qui circule, soit dans un câble métallique relié au sol par une paire
d'électrodes, soit dans une bobine métallique, se propagent dans le sous-sol, il
induit des courants électriques dans des conducteurs situés à proximité. Ces
courants secondaires circulent de façon telle que leur champ électromagnétique
(champ secondaire) s'oppose au champ électromagnétique inducteur (champ
primaire). L'intensité des courants alternatifs est plus grande dans les zones où la
conductivité électrique est plus élevée. Dans l'aire située au-dessus d'un
conducteur, le champ magnétique résultant se compose du champ primaire ou
"normal" produit en l'absence du conducteur et d'un champ secondaire dû à la
circulation des courants à la surface et dans le conducteur. De la même façon, des
corps de susceptibilité magnétique élevée perturbent le champ primaire mais
généralement à un degré moindre que les contrastes de résistivité appréciables. Le
champ magnétique résultant est généralement détecté à l'aide d'une bobine mobile
et sans attache au sol dans laquelle une force électromotrice est induite. L'intensité
des courants induits dépend, entre autre chose, de la résistivité électrique du
conducteur ou de la susceptibilité de la masse magnétique ainsi que de la fréquence
d'émission du champ primaire alternatif. Les courants secondaires sont d'autant
plus intenses que la résistivité est plus faible la susceptibilité plus grande et la

2
fréquence plus élevée. A n'importe quel point d'un champ électromagnétique, il
existe une intensité de champ électrique et une intensité de champ magnétique.
Une classification des méthodes électromagnétiques est nécessairement arbitraire.
La classification la plus élégante et la plus pratique consiste à diviser les méthodes
électromagnétiques en deux groupes distincts, soit les méthodes dans lesquelles la
source du champ primaire (émetteur) est fixe tandis que le récepteur est mobile et
les méthodes dans lesquelles l'émetteur et le récepteur sont mobiles. Dans le
premier groupe, on peut rencontrer des méthodes par conduction et des méthodes
par induction. Dans le premier cas, on fait circuler un courant alternatif ou continu
entre deux électrodes tandis que dans le second cas, on émet un champ magnétique
alternatif à la surface du sol. La distribution du courant dans le sous-sol peut être
déterminée au récepteur par deux techniques, soit à l'aide d'un magnétomètre qui
mesure directement l'intensité et/ou la direction du champ magnétique associé au
flux du courant dans le sous-sol, soit à l'aide d'une bobine orientée sur la surface
terrestre. La force électromotrice induite par l'intensité du champ magnétique
résultant est mesurée. La seconde technique est celle que l'on emploie couramment
de nos jours. En courant alternatif, la bande de fréquence utilisée varie entre 100 et
5000 Hertz.
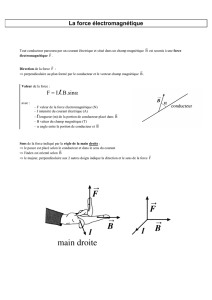
II. Théorie
Si un champ magnétique primaire Hp = Hp max(sin t) de fréquence f=
agit sur un système électrique, une bobine par exemple, la force électromotrice
induite dans le secondaire est à /2 en retard de phase par rapport au champ
primaire. Si R et L représentent la résistance et l'inductance de la bobine, le courant
circulant dans la bobine de même que le champ magnétique secondaire Hs = Hs
max[sin( t-/2-)] produit par ce courant sont en retard de phase de /2 par rapport
à Hp et = tan-1L/R
Le déphasage /2 est causé par la loi fondamentale d'induction et l'angle par les
propriétés électriques du circuit secondaire. Un bon conducteur produit un champ
secondaire Hs qui est quasi en opposition de phase du champ primaire Hp, car R
0, , /2 et en conséquence Hs = Hsmax sin(t-) ; le champ résultant
Hr=Hp+Hs est alors minimum. Par contre, un mauvais conducteur produit un
champ secondaire HS qui est à /2 en retard de phase par rapport à Hp car R ,
0 et en conséquence Hs = Hsmax sin(t-/2) ; le champ résultant est alors
maximum. La variation de fréquence f= du champ primaire Hp (ou
l'inductance dans le secondaire) ont le même effet. Si la fréquence est accrue et
devient très grande, , /2 et en conséquence Hs = Hsmaxsin( t- )

3
de sorte que Hr devient minimum. Si la fréquence décroît et à la limite devient très
petite, o, o et Hs = Hs maxsin(t-/2) de sorte que Hr devient
maximum.
La polarisation elliptique
Si l'espace dans lequel Hp est émis, contient des conducteurs, un champ
électromagnétique secondaire Hs se crée et il existe un déphasage entre
Hp = Hpmax sin(t) et Hs = Hsmax sin(t-/2- ) orientés dans l'espace de
façon arbitraire et faisant un angle entre eux. Le champ résultant (domaine des
fréquences ou des temps) Hr = Hp + Hs = Hrmaxsin( t- ). Si l'on considère un
plan qui contient les deux vecteurs Hp et Hs, le champ vecteur résultant Hr se
déplace dans un plan et son extrémité (i.e. amplitude) décrit une ellipse qu'on
appelle l'ellipse de polarisation.
Le champ résultant Hr décrit une ellipse par seconde. Ce champ résultant
est toujours polarisé elliptiquement indépendamment de la nature et du nombre de
circuits secondaires dus au(x) conducteur(s).
- Le cas d'un bon conducteur
Dans le cas d'un très bon conducteur, Φ=π/2
Hr=Hp.sin(t) +Hs. sin(t-)
Hr=Hp. sin(t)-Hs. sin(t)=(Hp-Hs). sin(t)
L'ellipse de polarisation dégénère donc en une ligne droite lorsqu'on a affaire à un
bon conducteur (polarisation linéaire). Si on applique cette théorie au cas d'une
veine ou d'un dyke vertical mince représentant un très bon conducteur ( 2 >> 1),
on peut alors imaginer que la majeure partie de la densité de courant se localise au
sommet du dyke et peut être représentée par une ligne ou un fil.
Si on appelle l'angle d'inclinaison entre le champ primaire Hp et le champ
résultant Hr on obtient le profil suivant.
Le cas d'un mauvais conducteur

4
Dans le cas d'un mauvais conducteur, on obtient :
Hr = Hp sin( t) + Hs sin( t- /2)
Hr = Hp sin( t)-HS cos( t)=X+Z et X=Xmaxsin t, Z=Zmaxcos t.
(X/Xmax)2+(Z/Zmax)2=1 l'équation de l'ellipse de polarisation devenant celle du
cercle (polarisation circulaire).
La classification des méthodes électromagnétiques (Angle d'inclinaison, Turam,
Slingram)
Les méthodes EM conventionnelles se prêtent tout aussi bien à des relevés en
profilage vertical qu'en profilage horizontal quoique le dernier mode soit de
beaucoup le plus couramment employé. Les trois méthodes EM les plus
communément utilisées sur le terrain actuellement sont les méthodes de l'angle
d'inclinaison, Slingram et Turam ; pour cette raison, l'auteur insiste davantage lors
de la description de ces méthodes.
La méthode de l'angle d'inclinaison
Cette méthode consiste à mesurer l'inclinaison de l'axe majeure de l'ellipse de
polarisation. On supposera d'abord qu'on effectue un profil EM orienté à 90° par
rapport à un conducteur allongé enfoui dans le sous-sol ; on représentera la
projection supérieure de ce conducteur comme étant un long fil. Le champ
magnétique primaire Hp est transmis au moyen d'une bobine ou d'un cadre orienté
dans le plan vertical et faisant un angle de 90° avec le profil de sorte que le vecteur
Hp est parallèle au profil.
L'angle entre le champ primaire émis dans une direction horizontale suivant la
ligne de cheminement et le champ résultant Hr s'appelle l'inclinaison et il est
déterminé à l'aide d'une bobine réceptrice dont l'axe horizontal est orienté à 90° par
rapport au profil. On fait alors effectuer une rotation à cette bobine autour de l'axe
horizontal jusqu'à ce que Hr soit contenu dans le plan de cette bobine. Le nombre
de lignes de flux du champ magnétique Hr qui recoupe l'aire à l'intérieur de la
bobine est minimum et on obtient donc la position du signal minimum aux

5
écouteurs. Si l'émetteur est un dipôle magnétique horizontal orienté parallèlement
au profil, le conducteur est situé en-dessous du point d'inflexion de la courbe de
réponse, ou en d'autres termes, du point où l'angle d'inclinaison est égal à zéro. Si
l'émetteur est un dipôle vertical, la position de l'angle de moindre inclinaison
s'exprime par un minimum sur la courbe de réponse et se situe au-dessus du
conducteur.
La méthode Turam
Le champ magnétique primaire Hp est produit par un cadre rectangulaire de grande
dimension ou un long câble relié au sol par une électrode ponctuelle à ses
extrémités dans lequel circule un courant alternatif. Deux bobines réceptrices
identiques reliées l'une à l'autre par un amplificateur, un compensateur et des
écouteurs sont séparés par une distance de quelques 15 m. A chaque point
d'observation on fait une mesure du rapport des amplitudes des voltages induits et
de leur différence de phase à l'aide d'une unité compensatrice.
En général, les unités Turam comportent 2 ou 3 fréquences d'émission.
Les bobines mobiles sont orientées suivant l'horizontale et l'on fait le rapport des
voltages et la différence de phase de la composante verticale HzR du champ
résultant. Les quantités mesurées avec la méthode Turam sont V2/V1, V3/V2…
Vn/Vn-1 et 2- 1 = 1, 3- 2= 2… n- n-1= n-1, où V représente le voltage
relatif aux amplitudes de la composante verticale du champ moyen résultant HzR et
le déphasage de ce champ aux stations 1, 2, 3…n.
Pour corriger la variation de la composante verticale du champ primaire, soit HzP
en fonction de la distance de mesure de la source, les rapports Vn / Vn-1 sont divisés
par les rapports d'amplitude normale rn / rn-1, les rapports de voltage normalisés
V2r1 / V1r2, V3r2 / V2r3, Vnrn-1 / Vn-1rn sont tous égaux en l'absence de conducteur
enfouis dans le sous-sol et leur valeur est 1.0.
Les écarts du rapport normalisés de le valeur 1.0 constituent une mesure du
gradient horizontal de l'amplitude du champ secondaire. Cette méthode présente
une excellente discrimination car on mesure la dérivée première de la composante
verticale du champ. Le procédé Turam est très sensible pour localiser de petits
conducteurs à grande profondeur.
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%