5 - Technologie des microprocesseurs

S1 - Chapitre 10 : Les microprocesseurs Page 1 / 16
Chapitre 10 : Les microprocesseurs
1 - CARACTERISTIQUES .................................................................................................................................................................... 2
1.1 - FREQUENCE................................................................................................................................................................................... 2
1.1.1 - La fréquence interne ............................................................................................................................................................ 2
1.1.2 - La fréquence externe ............................................................................................................................................................ 2
1.2 - TAILLE DES REGISTRES.................................................................................................................................................................. 2
1.3 - TAILLE DES BUS ............................................................................................................................................................................ 2
1.3.1 - La taille du bus de données .................................................................................................................................................. 2
1.3.2 - La taille du bus d’adresse .................................................................................................................................................... 2
1.4 - AUTRES ......................................................................................................................................................................................... 2
1.4.1 - La compatibilité ascendante ................................................................................................................................................. 2
1.4.2 - Le voltage ............................................................................................................................................................................. 3
1.4.3 - Les mesures des performances ............................................................................................................................................. 3
1.4.4 - Le nombre de transistors ...................................................................................................................................................... 3
2 - TRANSISTORS ET CIRCUITS INTEGRES ................................................................................................................................. 3
3 - CONCEPTION DES CIRCUITS INTEGRES................................................................................................................................ 4
4 - POURQUOI REDUIRE LA TECHNIQUE DE GRAVURE ? ...................................................................................................... 5
5 - TECHNOLOGIE DES MICROPROCESSEURS .......................................................................................................................... 6
6 - LE TRAITEMENT PARALLELE ( PLUSIEURS UAL) .............................................................................................................. 7
7 - LES COPROCESSEURS (OU FPU FLOATING PROCESSOR UNIT) ..................................................................................... 8
8 - LE CONTROLEUR DE DMA (DIRECT MEMORY ACCESS) .................................................................................................. 8
9 - LE MULTIPROCESSING ............................................................................................................................................................... 8
9.1 - L’ARCHITECTURE PARALLELE ....................................................................................................................................................... 8
9.2 - L’ARCHITECTURE PARTAGEE ........................................................................................................................................................ 8
10 - L’OVERDRIVE ............................................................................................................................................................................... 8
11 - L’OVERCLOCKING...................................................................................................................................................................... 8
12 - SYNTHESE SUR LES CONNECTEURS DE PROCESSEURS PC .......................................................................................... 9
13 - LES CHIPSETS ............................................................................................................................................................................... 9
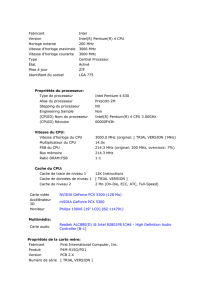
14 - LES PRINCIPAUX PROCESSEURS ........................................................................................................................................... 9
14.1 - INTEL CELERON .......................................................................................................................................................................... 9
14.2 - INTEL PENTIUM II ..................................................................................................................................................................... 10
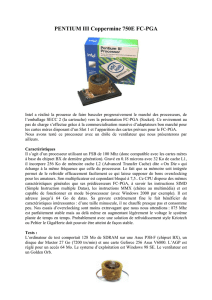
14.3 - INTEL PENTIUM III .................................................................................................................................................................... 10
14.4 - INTEL PENTIUM XEON ............................................................................................................................................................. 11
14.5 - AMD K6 II ............................................................................................................................................................................... 11
14.6 - AMD K6 III .............................................................................................................................................................................. 12
14.7 - ATHLON ................................................................................................................................................................................. 13
14.8 - LE G3 ........................................................................................................................................................................................ 13
14.9 - LE G4 ........................................................................................................................................................................................ 14
14.10 - LES AUTRES… ........................................................................................................................................................................ 14
15 - TABLEAUX RECAPITULATIFS ............................................................................................................................................... 14

S1 - Chapitre 10 : Les microprocesseurs Page 2 / 16
Le microprocesseur est une des pièces maîtresses de tout ordinateur. Il est appelé processeur ou CPU (Central
Processing Unit). C’est notre UC de traitement.
1 - CARACTERISTIQUES
1.1 - FREQUENCE
1.1.1 - LA FREQUENCE INTERNE
C’est la principale caractéristique retenue d’un processeur. Le microprocesseur est chargé d’exécuter les
diverses instructions d’un programme le plus rapidement possible. Afin d’augmenter ces performances une
première solution consiste à augmenter sa fréquence. Plus la fréquence d’horloge est élevée, plus l’ordinateur
est puissant ou rapide. La fréquence est donnée en Mhz (Méga-hertz). Les fréquences sont données par un
quartz dont une des propriétés est de vibrer quand il est découpé en fines lamelles.
La vitesse d’un processeur comme seul critère de performance est insuffisant car d’autres critères entrent en
ligne de compte, comme l’architecture interne du processeur.
Inconvénients de l’accélération des fréquences ?
- surcroît de consommation d’énergie (en watts)
- élévation de la température et de prévoir des systèmes de refroidissements
1.1.2 - LA FREQUENCE EXTERNE
La plupart des processeurs utilisent la technologie de multiplicateur de fréquence. En clair, le processeur
fonctionne plus vite que les autres éléments de la carte mère. Un processeur Pentium 75/50 fonctionne en
interne à 75 Mhz et 50 Mhz avec les autres éléments. On dit qu’il y a un coefficient multiplicateur de 1,5.
1.2 - TAILLE DES REGISTRES
On parle de processeur 16 bits, 32 bits ou 64 bits. Les processeurs Intel actuels sont des processeurs 32 bits.
1.3 - TAILLE DES BUS
1.3.1 - LA TAILLE DU BUS DE DONNEES
La taille des bus de données sur 64 bits pour les processeur Pentium signifie que les transferts d’informations
avec la mémoire sont réalisés par blocs de 8 octets. La taille des données 16, 32, 64 bits qu’ils manipulent est
une caractéristique des microprocesseurs.
1.3.2 - LA TAILLE DU BUS D’ADRESSE
La mémoire adressable (bus d’adresse de 20 bits) est passée de 1 Mo avec le processeur 8088 à 4 Go depuis le
496 (bus d’adresse sur 32 bits). L’espace mémoire adressable impose une limite à la quantité de mémoire qui
pourra être installée sur le PC.
1.4 - AUTRES
1.4.1 - LA COMPATIBILITE ASCENDANTE
Cela signifie qu’un logiciel développé pour un microprocesseur plus ancien fonctionnera avec les nouveaux
microprocesseurs. L’inverse n’est pas vrai car des logiciels développés pour des microprocesseurs plus récents
peuvent tirer partie des particularités de celui-ci pour être plus performants et ne peuvent alors fonctionner avec
l’ancien matériel. Cette compatibilité ascendante est un handicap car les concepteurs de ces circuits sont obligés
de conserver des instructions qui caractérisent les premiers microprocesseurs de la famille Intel. Elle est par
contre un fort atout pour la force de vente des constructeurs car elle garantit à un client la portabilité de ses
anciennes applications sur les nouvelles plates-formes. Le jeu d’instruction d’un microprocesseur est
l’ensemble des instructions qu’il est capable d’exécuter. Tout programme compilé par un compilateur est, entre

S1 - Chapitre 10 : Les microprocesseurs Page 3 / 16
autre, traduit avec le jeu d’instruction du microprocesseur sur lequel il sera exécuté. Avec une compatibilité
ascendante on utilise le jeu d’instruction du processeur.
1.4.2 - LE VOLTAGE
La tension de 0 volt représente le niveau logique bas « 0 » et 5 volts représente le niveau logique haut « 1 ». Les
portables actuels sont alimentés par des tensions de 3,3 volts voire 2,9 volts sur les portables et 5 volts sur les
machines de bureau.
1.4.3 - LES MESURES DES PERFORMANCES
Un certain nombre de tests de performance (benchmarks) sont proposés par les constructeurs de
microprocesseurs (les fondeurs) ou par des organismes divers. Il faut bien comprendre leurs mesures :
Le MIPS (Millions of Instructions Per Second) est une unité de mesure de la puissance des
ordinateurs. Toutefois, cette mesure n’est pas très significative si l’on considère que le traitement
d’instructions de branchement, de calcul sur les nombres flottants ou sur des entiers est sensiblement
différent.
Le SPECint (Standard Performance Evaluation Corporation / Integer) est une unité de mesure des
performances des processeurs basée sur une série de tests appropriés au traitement des entiers. La
version SPECint92 est maintenant remplacée par la version SPECint95.
Le SPECfp (Standard Performance Evaluation Corporation / Floating) est une unité de mesure des
performances des processeurs, basée sur une série de tests appropriés au traitement des entiers. La
version SPECfp92 est maintenant remplacée par la version SPECfp95.
Le Dhrystone est également une unité de mesure concernant les calculs sur les entiers.
De nombreux constructeurs ou organismes proposent leurs propres tests avec des unités lus ou
moins personnelles (WinBench, Winstine96…)
Autres indices de performances fait par Intel ou des groupements de sociétés :
L’indice iCOMP (Intel Comparative Micoprocessor performance)
L’indice SYSmark92 de BAPCo (Business Application Performance Cooperation)
Composition de l’indice iCOMP :
Performances
Test de performances
Pondération
Entiers 16 bits
Virgule flottante 16 bits
Entier 32 bits
Virgule flottante 32 bits
Graphiques 16 bits
Graphiques 32 bits
Vidéo 16 bits
Vidéo 32 bits
PC Labs Next Generation
Whetstone
SPECint92
SPECfp92
PC Labs Next Generation
SPECint92
PC Labs !next Generation
SPECcint92
53%
2%
15%
5%
10%
5%
5%
5%
1.4.4 - LE NOMBRE DE TRANSISTORS
Les microprocesseurs, comme la plupart des circuits intégrés, sont faits d’interrupteurs microscopiques appelés
transistors. Les pentiums actuels sont constitués de plusieurs millions de transistors.
2 - TRANSISTORS ET CIRCUITS INTEGRES
CI = transistors
CI (puce) = circuits intégrés = composants électroniques qui regroupe tous les éléments constitutifs d’un circuit
logique (transistors, diodes, condensateurs, résistances) , constitué généralement de silicium. (apparition dans
les années 60) ou des arséniures de gallium.

S1 - Chapitre 10 : Les microprocesseurs Page 4 / 16
La puce est encapsulée dans un boîtier comprenant des broches pour le transfert des signaux avec l’extérieur du
boîtier.
Le transistor = composant électronique dont le premier composant a été fabriqué en 1951. Il a remplacé les
lampes (tubes à vides) encombrantes et peu fiables, que l’on utilisait jusqu’alors.
Le nombre de composants placés sur une puce n’a cessé de croître avec le temps :
1965 = 30 composants sur une puce de 3 mm²
1980 = + 100 000 composants
2000 = 130 000 000 composants avec largeur des pistes à 0,35 à 0,25 µ
limites du silicium : 0,18 et 0,13 µ
2010 = 1 milliard de transistors
La diminution de la taille permet une amélioration des performances :
la taille donc la distance à parcourir par les signaux électriques diminue,
le nombre de transistors par puce augmente,
la taille diminue et donc la consommation électrique et le dégagement de chaleur diminuent.
Ce qui fait qu’une plus grande autonomie électrique permet une augmentation du processeur sans chaleur
excessive.
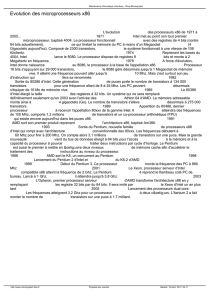
Les progrès accomplis dans l’intégration des circuits suivent une courbe régulière définie dès 1965, par Gordon
Moore. Cette « loi de Moore » dit que « le nombre de transistors d’un microprocesseur double tous les deux
ans environ ». A l’horizon 2000, on voit apparaître des processeurs comportant 130 millions de transistors et
peut-être 1 milliard de transistor vers l’an 2010.
Les types de circuits intégrés :
SSI (Small Scale Integration) pour quelques composants (100 transistors pour des circuits d’une dizaine de
portes logiques)
MSI (Medium ou Middle SI) jusqu’à 500 composants pour des circuits d’une centaine de portes logiques
LSI (Large SI) jusqu’à quelques milliers de composants pour des circuits d’un millier de portes logiques
(boîtier mémoire par exemple)
VLSI (Very Large SI) jusqu’à 10 000 composants
SLSI (Super LSI) actuellement environ 3 300 000 composants sur une puce.
ULSI (Ultra LSI) encore en laboratoire échelle d’intégration : 0,18 µ puis 0,13 µ
3 - CONCEPTION DES CIRCUITS INTEGRES
Conception à l’aide de la CAO et du DAO.
Chaque circuit est dessiné 500 fois plus gros que la réalité.
Conception du schéma ou masque pour guider un faisceau lumineux sur une plaque photoélectrique
appelée réticule.
Contrôle, correction, copie du réticule sur une fine tranche d’un barreau de silicium. Wafer = gaufrette de
0,3 mm d’épaisseur.
Silicium (sable) le plus abondant sur la terre après l’oxygène, c’est un semi-conducteur naturel.
Si ajout d’électrons = conducteur dopage
Si appauvrissement d’électrons = isolant
Isolation de la surface de chaque wafer par pellicule de produit chimique. On retire les matériaux des
endroits non isolés de la surface. Modification des propriétés semi-conductrices du silicium en chauffant
avec impureté chimique.
Répétitions pour avoir 20 couches. Elles sont reliées par 20 canaux d’aluminium.
Test du composant (10 000 vérifications par seconde )
Et encapsulation dans un boîtier et connexion de broches à des fils d’or soudés.
Au total 200 étapes pour un processeur et pour chaque étape 20 mn à 8h de conception.

S1 - Chapitre 10 : Les microprocesseurs Page 5 / 16
Les microprocesseurs sont fabriqués à partir du sable (le silicium), c’est la matière première des
microprocesseurs. D’abord le silicium est affiné à 99,999%, ensuite il est fondu, pour en faire des lingots
cristallins. Ceux-ci sont ensuite découpés en tranches très fines, dont les surfaces sont polies jusqu’à leur
donner une finition lisse comme un miroir. Une seule tranche de silicium suffit pour fabriquer plus de cent
microprocesseurs.
Chaque microprocesseur est construit à la manière d’un immeuble de plusieurs niveaux : on combine entre elles
plusieurs couches de matériaux pour créer une structure unique mais complexe. Chaque couche est réalisée au
moyen d’une technique appelée photolithographie : il s’agit de transférer, niveau par niveau, sur la tranche de
silicium le dessin d’ensemble des transistors et des circuits.
Le masque
Tout d’abord, on crée une sorte de patron miniature, appelé masque, qui représente le schéma du circuit prévu
pour chaque niveau. Le masque fonctionne un peu comme le négatif d’une photo, et permet d’imprimer sur la
tranche une partie du circuit exactement comme elle a été conçue.
Exposition
Selon la couche, on va déposer sur la tranche de silicium soit du matériau conducteur, soit du matériau isolant.
Pour ce faire on place un masque sur la tranche et on lui projette de la lumière UV pour assouplir les parties
exposées.
Gravure
Les parties du matériau qui étaient exposées à la lumière UV sont ensuite effacées à l’aide de solvants
chimiques. Résultat : les traits du patron subsistent sur la base en silicium sous forme de reliefs. Ensuite, on
répète l’ensemble du procédé pour les autres couches. Tâche délicate, car elles sont souvent aussi minces
qu’une cellule de bactérie.
Les composantes de base du microprocesseur sont les transistors. Ils sont superposés pour constituer les
différentes couches.
Encapsulation
Après quelques 250 opérations, la tranche est découpée par des lasers spécialisés en plaquettes ou puces.
Chaque puce est ensuite encapsulée dans un boîtier muni de broches qui assurent les connexions avec les autres
éléments de l’ordinateur.
Vu de plus près le processeur Pentium contient 20 couches ultraminces de matériaux tels que le dioxyde de
silicium, l’aluminium et le tungstène, toutes superposées sur la tranche de silicium. Chaque couche possède son
« patron » individuel. Une fois combinées avec les autres couches, elles forment les millions de transistors et de
circuits qui constituent l’architecture du processeur.
4 - POURQUOI REDUIRE LA TECHNIQUE DE GRAVURE ?
Schématiquement, il est possible de dire qu’il y a plusieurs facteurs :
- Plus les transistors sont petits, plus les distances peuvent être réduites, donc une diminution des temps
de transferts de données,
- Réduction de la surface du processeur avec une réduction du voltage nécessaire,
- Finesse de gravure permettant une augmentation du nombre de puces dans la tranche de silicium.
Voici un schéma récapitulant les évolutions dans la technique de gravure :
1995
Début 1997
Fin 1997
1999
2002
0,6 micron
0,35 micron
0,25 micron
0,18 micron
0,13 micron
Pentium Pro
Pentium II
Bus 100Mhz
Bus 133 Mhz
Bus 66 Mhz
Bus 66 Mhz
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%