Introduction : Les ultrasons sont des ondes sonores ayant une

1
I. Introduction :
Les ultrasons sont des ondes sonores ayant une fréquence supérieure à 20000Hz,
c’est-à-dire au-delà du seuil d’audibilité de l’oreille humaine.
Dès 1822, un physicien suisse utilise les ultrasons pour mesurer la vitesse du son
sous l'eau.
En 1883, Galton invente un sifflet à ultrasons. En soufflant dans ce sifflet,
l'homme ne perçoit rien, alors que les chiens réagissent.
En 1912, 1 mois après le naufrage du TITANIC, naît l'écho radar sous-marin
appelé SONAR.
En 1942, un médecin (DUSSIK) utilise ultrasons pour le diagnostic médical.
En 1961, les ultrasons sont utilisés pour visionner des images de fœtus.
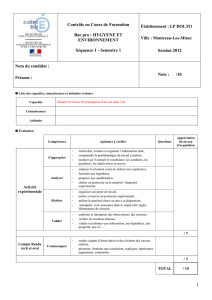
D'abord utilisé dans le domaine militaire, puis dans l'exploration des mondes
sous-marins et dans le domaine de la médecine, les ultrasons sont utilisés depuis
20 ans dans le domaine de la beauté. Pour l'être humain, l'ultrason ne s'entend
pas alors que de nombreux animaux le comprennent clairement.
Qu’est-ce qu’un télémètre à ultrasons?
Un télémètre à ultrasons sert à mesurer une distance. Le principe, inspiré de la
chauve-souris, est d’envoyer une salve d’ultrasons vers un objet les
réfléchissant, tel qu’un mur ou une vitre, et de capter l’écho renvoyé par cet
objet. On accède à la distance séparant le télémètre de cet objet en mesurant le
temps que met l’écho pour revenir au télémètre. Connaissant la vitesse du son,
on déduit la distance cherchée. Les avantages d’un tel moyen de mesure sont
multiples. On n’est plus obligé de disposer d’un objet de référence tel qu’un
mètre, la mesure est rapide même sur plusieurs mètres, et on peut, sans risque,

2
mesurer des distances difficiles d’accès. Par exemple, on peut facilement relever
la hauteur d’un plafond.
1. Les types de capteur ultrasonique
détection de présence ou de non présence d'objets (tout ou rien).
évaluation de la distance séparant l'objet du détecteur (système analogique
souvent sortie 4 – 20 mA).
évaluation de la distance séparant l'objet du détecteur (système analogique
- numérique sortie sur 8 bits). Permet le traitement par automates
programmables et P.C.
2. Objectifs du projet :
Le sujet de notre projet est l’étude d’un télémètre ultrason avec simulation pour
mesurer la fréquence et la période d’un ultrason, ainsi que sa vitesse et
déterminer la distance d’un objet de l’appareil grâce aux ultrasons.
3. Structure adoptée :
Les objectifs étant fixés ; Nous avons donc établi la structure générale de notre
télémètre.
Cette structure est modulaire, afin de la rendre aussi claire que possible
Du fonctionnement du télémètre se dégagent trois modules: un module
d’émission, un module de réception et un module qui permet d’afficher la
distance mesurée. De plus, un module de commande interagissant avec les trois
autres est nécessaire pour contrôler le fonctionnement de l’ensemble du
télémètre.

3
Figure 1 : Schéma global du system
4. La paire de transducteurs :
Les composants les plus importants et les plus incontournables pour notre projet
sont les deux transducteurs piézoélectriques. En effet, c’est cette paire de
transducteurs qui nous a permis de transformer l’énergie électrique en énergie
sonore (pour le transducteur émetteur) et de convertir le signal sonore reçu en un
signal électrique utile.
Puisque tout le montage doit être construit autour de ces composants et va
dépendre de leur fonctionnement, nous avons jugé nécessaire de procéder à une
étude expérimentale de la paire émetteur/récepteur, plutôt que de nous baser
uniquement sur les données du constructeur qui peuvent s’avérer légèrement
approximatives lorsqu’on passe d’une paire de transducteurs à une autre.
L’objectif principal de cette étude a évidemment été de déterminer leur
fréquence de résonance, c’est à dire la fréquence avec laquelle on doit alimenter
le transducteur émetteur.

4
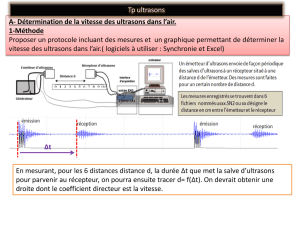
L’étude consiste à placer l’émetteur et le récepteur l’un en face de l’autre distant
d’environ 1 cm (cela permet d’avoir en réception un signal de grande amplitude
facile à étudier). On évite ainsi les problèmes liés à la réflexion de l’onde sonore
sur un obstacle. En outre, on alimente l’émetteur (avec un GBF) avec une
tension sinusoïdale d’amplitude 5V et de fréquence variable. La courbe de gain
(figure 2) représentée à la page suivante est donc obtenue.
En conclusion, nous utiliserons une fréquence de 40 kHz pour l’alimentation de
l’émetteur.
En outre, la paire de transducteurs est très sélective. Ainsi lorsqu’on alimente
l’émetteur avec un signal carré seul le fondamental peut être reçu en sortie du
récepteur. Enfin nous avons noté que le gain est indépendant de l’amplitude de
l’excitation et remarqué la présence d’une deuxième fréquence de résonance à
55.5 kHz avec un gain de –13.98 dB.
La partie suivante va donc s’attacher à expliquer comment générer le signal de
40kHz qui va alimenter l’émetteur.
Figure 2 : Courbe de gain

5
II. Le module d’émission :
Il s’agit d’un générateur d’ultrasons de fréquence nominale 40 kHz. Un
interrupteur permet de choisir entre deux modes d’émission :
- Emission en continu
-Emission par salves (de durée 0,7 ms avec une période de répétition de
17 ms)
Pour le schéma électrique nous proposons une adaptation:
-sans quartz (car la valeur 40 kHz est difficile à trouver).
-avec un seul type de porte (4011B, quadruple porte NAND en
technologie CMOS).
- avec de plus, la possibilité d’émettre en continu (sélection par
interrupteur).
Schéma électrique :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%