A partir d`un dessin d`ensemble de mécanisme

Prof
COURS
PJ
Les mécanismes
Doc Prof
1
769802156 http://joho.monsite.orange.fr/ Page 1
A partir d'un dessin d'ensemble de mécanisme:
Identifier les liaisons.
Mettre en évidence et caractériser géométriquement les surfaces associées aux liaisons.
Définir les mouvements relatifs des sous-ensembles cinématiquement liés.
Les mécanismes
1 : Les mouvements relatifs entre solides
1.1 : Le mouvement et le repérage.
Lorsque on définit le mouvement d'un solide ou d'un point de ce solide, la définition n'a
un sens que si l'on définit ce mouvement par rapport à un autre solide.
Exemple : Un voyageur est assis dans un train. Son mouvement par rapport au train est
nul, par contre le voyageur est en mouvement par rapport à la terre (la terre est
un solide)
Pour définir (ou modéliser) un mouvement ou une trajectoire d'un ou plusieurs solides,
c'est à dire écrire une ou des équations mathématiques, il est impératif de choisir un ou
plusieurs repères que l'on associe généralement à chacun des solides.
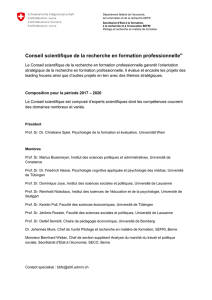
Exemple : Un cycliste est assis sur son vélo, un supporter le regarde passer. Chacun d'eux
regarde un point sur le pneu, qu'elle est trajectoire de ce point pour le cycliste?
Un cercle ...............................................................................................
Pour le supporter? Une cycloïde ..................................................
X0
Y0
X1
Y1
X2
Y2

Prof
COURS
PJ
Les mécanismes
Doc Prof
2
769802156 http://joho.monsite.orange.fr/ Page 2
1.2 : Les mouvements et trajectoires élémentaires
La trajectoire est définie par l'ensemble des positions, dans le temps, d'un point du solide
en mouvement.
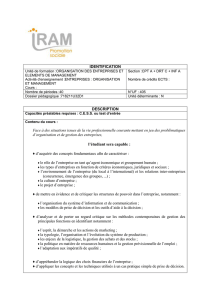
1.2.1 : Le mouvement de translation
Un solide S1 est en mouvement de translation par rapport à un solide S0 si la droite
joignant deux points quelconques M et M' non confondus du solide S1 reste
parallèle à elle-même au cours du mouvement de S1 par rapport à So.
1.2.2 : Le mouvement de rotation autour d'un axe ou point fixe :
Un solide S1 est en mouvement de rotation autour d'un point fixe d'un solide S0 si un
point 0 du solide S1 reste fixe au cours du mouvement de S1 par rapport à So.
X0
Y0
X1
Y1
X1
Y1
M
M'
M
M'
S0 : La Terre .....................................
S1 : La mongolfière .........................
S0 : le cadran de la montre ............
S1 : l'aiguille .....................................
O : le point fixe ................................
X0
Y0
X1
Y1
O
Tout au long de la trajectoire, le
segment MM' reste parallèle à lui-
même.

Prof
COURS
PJ
Les mécanismes
Doc Prof
3
769802156 http://joho.monsite.orange.fr/ Page 3
1.3 : Les degrés de liberté
Du point de vue cinématique (étude des mouvements), tout solide S1 libre par
rapport à solide S0 peut avoir, par rapport à ce solide, 6 mouvements élémentaires : 3
translations (Tx, Ty, Tz) et 3 rotations (Rx, Ry, Rz) :
Tx définit une liberté de mouvement de translation rectiligne de S1/S0 le long de l'axe X0
(ou O0x0).
Rx définit une liberté de mouvement de rotation de S1/S0 autour de l'axe X0 (ou O0x0).
Le mouvement d'un repère R1 lié à un solide S1 par rapport à un repère R0 lié à un solide
S0 dépend de 6 paramètres indépendants. Ces paramètres portent le nom de degrés de
liberté de S1 par rapport à S0.
Ainsi, l'étude d'un mouvement, aussi complexe soit-il, peut se ramener à l'étude d'une somme
de mouvements élémentaires.
Pour étudier le mouvement d'un solide par rapport à un autre, il faut connaître les différentes
liaisons existantes entre ces 2 solides, s'il y en a.
X1
Z1
Y1
X0
Z0
Y0
S0 : Terre + basketeur ....................
S1 : Ballon .........................................
Le ballon S1 a 6 degrés de liberté
par rapport au basketeur S0
3 translations :
Tx suivant l'axe X0 ......................
Ty suivant l'axe y0 .......................
Tz suivant l'axe z0 .......................
3 rotations :
Rx autour de l'axe X0 ..................
Ry autour de l'axe y0 ...................
Rz autour de l'axe z0 ...................
X0
Z0
Y0

Prof
COURS
PJ
Les mécanismes
Doc Prof
4
769802156 http://joho.monsite.orange.fr/ Page 4
2 : Les liaisons entre solides
Etablir une liaison mécanique entre 2 solides, c'est supprimer un certain nombre de
degrés de liberté entre ces 2 solides par des surfaces de contact appelées surfaces
fonctionnelles de liaison.
2.1 : Les liaisons simples élémentaires
Liaison
mouvements
possibles
degrés de
liberté
schéma normalisé
Ponctuelle
Rx
Ry
Rz
Tx
Ty
...
5
Linéaire rectiligne
Rx
...
Rz
Tx
Ty
...
4
Linéaire annulaire
Rx
Ry
Rz
Tx
...
...
4
Rotule
Rx
Ry
Rz
...
...
...
3
Appui plan
...
...
Rz
Tx
Ty
...
3
Pivot glissant
Rx
...
...
Tx
...
...
2

Prof
COURS
PJ
Les mécanismes
Doc Prof
5
769802156 http://joho.monsite.orange.fr/ Page 5
2.2 : Les liaisons composées élémentaires
Liaison
mouvements
possibles
degrés de
liberté
schéma normalisé
Pivot
...
...
Rz
...
...
...
1
Glissière
...
...
...
...
...
Tz
1
Hélicoïdale
...
...
Rz
...
...
Tz
1
Encastrement
...
...
...
...
...
...
0
2.3 : Les sous-ensembles cinématiquement liés
Définition :
On appelle solide ou sous-ensemble cinématiquement lié (ou de classe d'équivalence
cinématique), un groupe de pièces qui n'ont aucun mouvement les unes par rapport aux
autres au cours du fonctionnement normal du mécanisme.
Conclusion :
S'il existe une liaison encastrement entre 2 solides, ils appartiennent alors à la même classe
d'équivalence cinématique.
1
/
5
100%