dossier technique

Ressources DT TP32 Page 0 sur 16
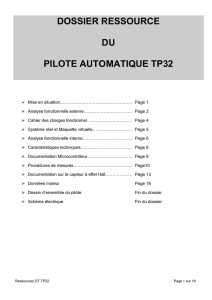
DOSSIER RESSOURCE
DU
PILOTE AUTOMATIQUE TP32
Mise en situation…………………………………………...
Page 1
Analyse fonctionnelle externe…………………………….
Page 2
Cahier des charges fonctionnel…………………………..
Page 4
Système réel et Maquette virtuelle……………………….
Page 5
Analyse fonctionnelle interne……………………………..
Page 6
Caractéristiques techniques………………………………
Page 8
Documentation Microcontrôleur…………………………..
Page 9
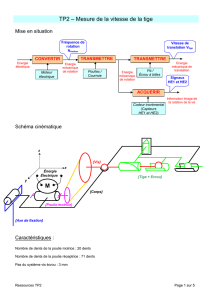
Procédures de mesures…………………………………...
Page10
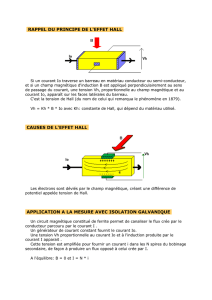
Documentation sur le capteur à effet Hall……………….
Page 13
Données moteur
Page 16
Dessin d’ensemble du pilote
Fin du dossier
Schéma électrique
Fin du dossier

Ressources DT TP32 Page 1 sur 16
Documentation technique du Pilote TP32
Mise en situation
Le pilote automatique est utilisé sur les voiliers pour :
- ne pas être occupé à manœuvrer la barre pendant
toute la durée de la navigation
- soulager le barreur fatigué par la concentration que
demande le maintien d’un cap précis
- avoir les mains libres lors des manœuvres à
équipage réduit
Le pilote est fixé en deux points au bateau (cockpit et
barre).
Un compas mesure le cap du bateau.
Tant que le bateau est sur la route souhaitée par l’équipage, la barre reste en position.
Si le bateau quitte sa route, le pilote actionne sa tige en liaison avec sa barre, et ramène le
bateau sur son cap.
Notice simplifié du pilote
Alimentation sous 12V continu
5 touches seulement permettent de faire fonctionner l’appareil.
Une fois sous tension le pilote se met en mode « manuel » et en mode compas, le voyant de
compas clignote. En mode manuel le pilote TP32 n’assure pas le maintien au cap voulu. Il est
possible de déplacer la tige, à droite ou à gauche, en actionnant les touches de commande.
Le passage en mode « automatique » s’effectue en appuyant sur la touche Set/Auto, le voyant
de compas reste allumé. Le pilote TP32 assure le maintien du cap qui était suivi au moment du
passage en mode automatique.
Touche Set/auto
(Mode manuel/automatique)
Sortie de la tige
(tribord)
Rentrée de la tige
(bâbord)

Ressources DT TP32 Page 2 sur 16
Analyse fonctionnelle externe
Enoncé du besoin :
Validation du besoin :
Pourquoi le produit existe-t-il (cause, origine,…) ?
Parce que barrer un bateau est contraignant (fatigue, mains occupées,…)
Pourquoi ce besoin existe-t-il (finalité, but,…) ?
Pour donner plus de liberté à l’équipage
…
Qu’est ce qui pourrait faire évoluer le produit ?
D’autres systèmes de guidage du bateau qu’une barre franche (barre à roue,…)
D’autres types d’actionneurs de la barre franche (suppression du vérin)
D’autres systèmes de navigation en mer
D’autres sources d’énergie
Evolution des solutions technologiques utilisées, en réponse à des problèmes rencontrés
…
Qu’est ce qui pourrait faire disparaître le produit ?
Autre mode de pilotage des voiliers
Disparition des bateaux a voile
…
PILOTE
TP32
Manœuvrer la barre en fonction
du mode de navigation
présélectionné
Le barreur
et les
équipiers
La barre

Ressources DT TP32 Page 3 sur 16
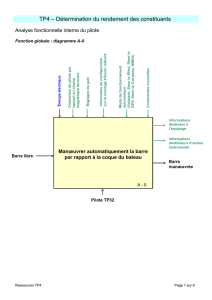
Graphe des interactions
FP1 : Manœuvrer automatiquement la barre par rapport à la coque du bateau
FC1 : Se fixer et se démonter sur la coque
FC2 : Communiquer avec l’équipage
FC3 : Etre esthétique
FC4 : Etre silencieux
FC5 : Résister à l’eau de mer
FC6 : Résister à l’air ambiant
FC7 : Détecter sa position par rapport au champ magnétique terrestre
FC8 : S’adapter à l’énergie disponible à bord
FC9 : Se fixer et se démonter sur la barre
FC10 : Communiquer avec d’autres instruments de navigation
FP 1
FC 5
PILOTE
TP32
FC 1
FC 2
FC 3
FC 4
FC 6
FC 7
FC 8
FC 9
FC 10
Équipage
Instruments
de navigation
Mer
Air
Batterie et
dispositif de
charge
Terre
Barre
Coque du
bateau

Ressources DT TP32 Page 4 sur 16
Caractérisation des fonctions de service :
Classes
Flexibilités
Niveaux
F0
F1
F2
F3
nulle
faible
moyenne
forte
impératif
peu négociable
négociable
très négociable
Fonctions
de
services
Critères d’appréciation
Niveaux d’appréciation
Flexibilité
FP1
Poussée sur la barre
Course
Temps pour effectuer la course à vide
Temps pour effectuer la course à 20 kg
Temps pour effectuer la course à 40 kg
Temps pour effectuer la course à 50 kg
Temps pour effectuer la course à 85 kg
Débattement angulaire de la barre
Jusqu’à 850 N
250 mm
Au plus 4 s
Au plus 4,7 s
Au plus 6 s
Au plus 8 s
Au plus 12 s
de –16° à +16°
F1
F1
F1
F1
F1
F1
F1
F1
FC1
Type de liaison
Type de montage
Démontable
Bâbord ou Tribord
F0
F0
FC2
Réglages et configurations
Visualisation des informations
Commande manuelle
5 boutons (NAV, TACKS, BABORD,
TRIBORD, STBY AUTO)
4 voyants (NAV, BABORD,
TRIBORD, STBY AUTO)
+/- 1 degré (appui bref)
+/- 10 degré (appui long)
F0
F0
F0
F0
FC3
Formes et couleurs
Agréables
F3
FC4
Nombre de décibels
Au plus 40 décibels
F2
FC5
Hauteur d’eau
Projections d’eau de mer
F0
FC6
Matériaux
Inoxydable
Résistant aux ultraviolets
F0
F0
FC7
Orientation du pilote par rapport au
champ magnétique terrestre
+/- 1 degré
F0
FC8
Tension
Intensité en mode Stand By
Intensité typique en mode automatique
12 V continu (entre 10 V et 16 V)
0,06 A
0,5 A
F0
F0
F0
FC9
Type de liaison
Type de montage
Démontable
Bâbord ou Tribord
F0
F0
FC10
Protocole de communication
Protocole NMEA
F0
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%