LE PIC 16C57C - Sn-Bretagne

COURS : LE PIC 16C57C
LYCEE LA FAYETTE 1/9
LE PIC 16C57C
Sommaire
I. PRESENTATION………………………………………………………………………….1
II. CARACTERISTIQUES…………………………………………………………………..2
III. L’OSCILLATEUR……………………………………………………………………….3
IV. INITIALISATION (RESET) et WATCHDOG………………………………………...4
V. ORGANISATION DE LA MEMOIRE ROM ET RAM………………………………..5
VI. CONFIGURATION DES PORTS………………………………………………………7

COURS : LE PIC 16C57C
LYCEE LA FAYETTE 2/9
I. PRESENTATION
Le PIC 16C57C faut partie de la famille des PIC 16C5X qui regroupe les PIC : 16C54, 16C56, 16C57,
16C58.
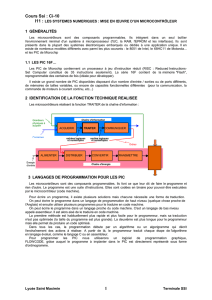
Voilà ci-dessous l'architecture interne d'un PIC de la famille 16C5X :
1/ Sur le schéma ci-dessus, encadrez les fonctions suivantes:
- Mémoire vive ;
- Mémoire morte de programme ;
- Interface d'entrée/sortie ;
- Horloge
- Chien de garde.
2/ Combien de ports contiennent les PIC de la famille 16C5X ?
………………………………………………………………………………………………………………………………………………….

COURS : LE PIC 16C57C
LYCEE LA FAYETTE 3/9
II. CARACTERISTIQUES
Le tableau ci-dessous regroupe les informations des PIC 16C5X :
1/ Quelle est la vitesse maximale de l’horloge que l’on peut appliquer au PIC 16C57C ?
………………………………………………………………………………………………………………………………………………….
2/ Quelle est la taille (en kilo-bits) de la mémoire programme du PIC 16C57C ?
………………………………………………………………………………………………………………………………………………….
3/ Quelle est la taille de la RAM (en octets) de la mémoire vive du PIC 16C57C ?
………………………………………………………………………………………………………………………………………………….
4/ Le PIC 16C57C contient-il une mémoire EEPROM interne ?
………………………………………………………………………………………………………………………………………………….
5/ Combien d’entrées – sorties contient le PIC 16C57C ?
………………………………………………………………………………………………………………………………………………….
6/ Combien d’instructions de programmation supporte le PIC 16C57C ?
………………………………………………………………………………………………………………………………………………….

COURS : LE PIC 16C57C
LYCEE LA FAYETTE 4/9
III. CONFIGURATION DE L’OSCILLATEUR
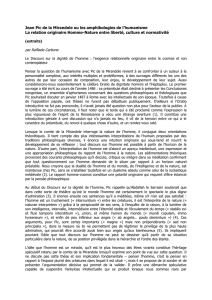
Rappel : L’oscillateur est le dispositif permettant de cadencer l’exécution du programme du PIC (par
exemple, à l’aide d’un quartz). Le schéma structurel d’un oscillateur à base de quartz est le suivant :
1/ En vous aidant de l’architecture du PIC16CX donnée en page 1, citer les deux broches d’entrée
d’horloge. Indiquer le nom de ces broches sur le schéma ci-dessus.
………………………………………………………………………………………………………………………………………………….
2/ Le tableau ci-dessous, issu de la documentation technique du PIC16CX, donne la valeur des
capacités C1 et C2 à utiliser pour l’oscillateur en fonction de la fréquence du quartz.
Sachant qu’on utilise un quartz de type XT, et de fréquence 4MHz, quelles doivent être les valeurs de
C1 et C2 afin de correctement dimensionner l’oscillateur ?
………………………………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………………………………….
3/ Le cadencement des instructions du programme à l’intérieur de la mémoire du PIC se fait grâce au
signal d’horloge issu de l’oscillateur. Cependant, la fréquence à laquelle sont exécutées les
instructions du programme est égale au quart de la fréquence issu de l’oscillateur.
Fréquence d’exécution des instructions = Fréquence de l’oscillateur / 4
Calculer la durée d’exécution d’une instruction standard si la fréquence de l’oscillateur est de 4 Mhz.
………………………………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………………………………….
Oscillateur à
quartz

COURS : LE PIC 16C57C
LYCEE LA FAYETTE 5/9
IV. L’INITIALISATION DU PIC16C57C (RESET)
Le RESET est l’opération permettant d’initialiser le PIC. Cette opération peut être effectuée de deux
manières :
- A la mise sous tension du système (RESET hardware), par l’intermédiaire de la broche
\MCRL.
- Lors d’un plantage dans l’exécution du programme (RESET software) par l’intermédiaire
du Watchdog (chien de garde).
IV.1. Le RESET hardware
A chaque mise sous tension du système, il faut initialiser le PIC pour qu’il puisse commencer à
exécuter son programme.
Cette opération se fait de la manière suivante :
- Après l’application de la tension d’alimentation VDD, il faut laisser la broche \MCLR à l’état
bas pendant une durée minimale tMIN ;
- Lorsque \MCRL passe à l’état haut, le PIC est initialisé en interne après une durée TDRT.
IV.2. Le RESET par watchdog (chien de garde)
Un chien de garde est un dispositif logiciel (cas du PIC, mais il en existe des matériels réalisés par une
structure électronique externe au micro) permettant de vérifier que le programme s’exécute
correctement.
Le chien de garde logiciel est un compteur dont la taille est configurable et qui envoie une impulsion
interne au PIC toute les 18ms (par défaut), ce qui a pour effet d’initialiser le PIC.
En fonctionnement normal (lorsque le programme ne bogue pas), le but est d’éviter l’apparition de
cette impulsion. Pour cela, le programme exécuté par le PIC remet à 0 la valeur du compteur
régulièrement avant que s’écoule 18 ms.
Dans le cas d’un plantage du programme, la valeur du compteur ne sera pas remise à 0 et le chien de
garde enverra une impulsion de RESET au bout de 18ms, ce qui aura pour effet de réinitialiser le PIC.
VDD
MCLR
RESET INTERNE DU PIC
 6
7
8
9
6
7
8
9
1
/
9
100%