Ouvrir / Télécharger

Note d’application
Modélisation et simulation d'un moteur roue sous Comsol
Génie Electrique
Projet 2012 GE2-GE3
Sujet: P11AB09 : Simulation et détermination des paramètres
de fabrication optimaux d'une génératrice & Modélisation d’un
moteur roue et simulation
Entreprise / Client : Entreprise WINDELA représentée par Mr. AUDUBERT &
Département Génie Physique de Polytech' Clermont-Ferrand représentée par Mr.
Lionel BATIER
Responsable Projet : Mr. Jacques LAFFONT
Tuteur industriel : Mr. Jean-Yves RIGNAULT
Tuteur technique : Mr. Rafik SMAALI
Janvier 2012

Note d’application Projet-P11AB09
Qiao FU - Génie Electrique 3ème année Page 2

Note d’application Projet-P11AB09
Qiao FU - Génie Electrique 3ème année Page 3
Table des matières
1) Introduction ....................................................................................... 1
2) Moteur Roue ...................................................................................... 1
3) Méthode des éléments finis (MEF) .................................................... 7
4) Logiciel Comsol ................................................................................... 8
5) Modélisation du moteur roue ............................................................ 8
5.1) La stratégie de la modélisation ..................................................... 8
5.2) Modélisation géométrique ......................................................... 10
5.3) Modélisation physique ............................................................... 13
5.4) Maillage ...................................................................................... 16
6) Simulation du moteur roue .............................................................. 17
7) Conclusion ........................................................................................ 20

Note d’application Projet-P11AB09
Qiao FU - Génie Electrique 3ème année Page 4
1) Introduction
La modélisation et simulation informatique est une méthode principale aujourd’hui
pour réaliser la conception d’une machine électrique. Dans notre cas, la
modélisation consiste à produire des images d’objet réel. La simulation permet tant
d’étudier les caractéristiques données que de simuler le fonctionnement d’un engin
électrique réel et montrer sa performance. Par opposition aux moyennes
traditionnelles, cette méthode rend l’élaboration des dispositifs électriques plus
compréhensible, modifiable et efficace.
Ce document a pour l’objectif d’écrire cette méthode sous logiciel COMSOL, portée
sur un moteur roue qui fait avancer une voiture solaire.
2) Moteur Roue
Le département Génie Physique a développé une voiture solaire Bélénos. Un moteur
roue installé à la roue arrière sert à transmettre l’énergie électrique en énergie
mécanique et donc à propulser la voiture. A l’aide du panneau solaire et une batterie
dédiée, l’énergie solaire est transférée en énergie électrique et conservée. Après
avoir adopté un convertisseur, le moteur est définitivement alimenté par une source
triphasée.
Figure 1 : Voiture solaire Bélénos

Note d’application Projet-P11AB09
Qiao FU - Génie Electrique 3ème année Page 5
Figure 2 : Moteur roue
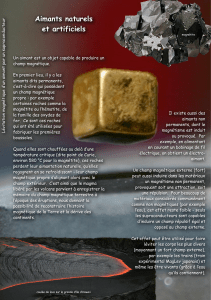
Comme la plupart des machines électriques, ce moteur consiste en deux parties :
Stator et Rotor. Le bobinage qui joue le rôle de Stator est placé intérieur dont les
trois phases de courant sont fournis (orange, bleu et vert). Au niveau du rotor,
chacun des deux est constitué par 40 aimants trapézoïdaux et un acier circulaire. Par
paire d’aimant, 12 fils conducteurs sont assignés.
Figure 3 : 40 aimants sur un rotor du moteur roue
Un moteur roue est similaire à un moteur rotatif dont le stator et le rotor sont
découpés suivant un plan. La génération du flux du moteur roue est axial. Cela
permet de le nommer également moteur plat. Tant que le moteur roule autour de
l’axe horizontal, la génération du flux magnétique dans les aimants et les aciers est
suivant des flèches noires (les lignes de champ magnétique). Suivant la Théorème
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%