I Analyse structurelle


I Analyse structurelle
Le trilobite est un aspirateur automatisé produit par Electrolux. L’idée du nom
TRILOBITE et sa forme vient d’une famille d’arthropodes qui ont vécu sur Terre il y
a des centaines de millions d’année, qui était de petite taille, vivant dans les fonds
marins. Ce sont les fossilles les plus connus et reconnus, grace a leur coquille très
dure. C’est ce qui a inspiré Electrolux pour le nom de ce robot aspirateur, petit et
solide.
Meme si le succes des robots automatisé reste mitigé, le trilobite est destiné
exclusivement au grand public, qui pour 1000€, fait un travail comparable au robot
industriels.
Cet aspirateur autonome possede de grands avantage comparé au aspirateur
classique : Il fait gagner du temps a l’utilisateur, il n’a juste qu’a l’allumer et
programmer son mode de travail. Il est peu encombrant, et est efficace sur
Toute les surfaces lisses tel que le parquet et le carrelage. Le seul
Inconvénient et qu’il est limité au petite particules. Il ne remplacera donc votre
vieux aspirateur.
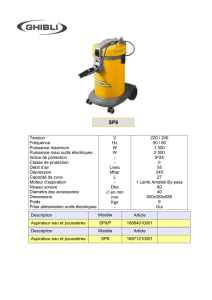
1) Description et fonction principale
GERER LE CYCLE D’ ASPIRATION EN FONCTION DES CONSIGNES
ET DE LA CONFIGURATION DE LA PIECE
Rôle :
Elle permet de commander le déplacement de l’aspirateur à partir des
consignes de l’utilisateur (……….) et des informations sur la
configuration de la pièce fournie par les différents capteurs.
DIALOGUER AVEC L’ UTILISATEUR
Rôle :
Elle permet à l’utilisateur de configurer l’aspirateur afin qu’il réalise le
cycle d’aspiration désiré. La saisie des consignes est effectuée à l’aide
d’un clavier à 5 touches et l’affichage des menus est réalisé sur un
afficheur LCD. Un BUZZER, permet à l’aspirateur de générer différents
effets sonores, afin de signaler certaines phases spécifiques du
fonctionnement. Une LED permet la mise au point par le technicien
GENERER L’ HEURE, LA DATE
FP1
FP2
FP3

Rôle :
Elle permet de générer la date et l’heure courante afin de permettre le
lancement automatique (à une date programmée par l’utilisateur) d’un
cycle d’aspiration. Cela est réalisé a l’aide du bus I2C.
( Etude de la carte 1)
MESURER LA DIRECTION DU DEPLACEMENT
Rôle :
Elle permet à l’aspirateur de connaître la direction du déplacement de
l’aspirateur par la mesure du champ magnétique terrestre (Boussole).
( Etude de la carte 1)
DETECTER LA PRESENCE DU SOL
Rôle :
Elle permet à l’aspirateur de détecter la présence ou l’absence du sol
devant lui afin d’éviter une chute (dans les escaliers par exemple). En
cas de soulèvement de l’aspirateur par l’utilisateur, elle provoque l’arrêt
immédiat du cycle d’aspiration.
2 LED permettent de visualiser l’état de la carte et la réception.
DETECTER ET LOCALISER LES OBJETS ENVIRONNANTS
Rôle :
Elle permet à l’aspirateur de détecter la présence d’obstacles dans la
pièce (Mur où objet) afin de les éviter et d’assurer un déplacement
pseudo aléatoire dans la pièce.
DETECTER LES BANDES MAGNETIQUES (non étudiée )
Rôle :
Elle permet la détection du champ magnétique, émis par les bandes
magnétiques collées sur le sol par l’utilisateur, afin d’interdire l’accès à
certaines parties de la pièce.
Elle permet également de détecter les bandes magnétiques fixées sous
le chargeur, afin de permettre la recharge des batteries de manière
automatique.
PILOTER LES MOTEURS
Rôle :
Elle permet d’assurer le déplacement de l’aspirateur sur le sol par le
pilotage des 2 moteurs pas à pas, en fonction des ordres de
déplacement fournis par la fonction FP1.
FP4
FP5
FP6
FP7
FP8

ASPIRER LA POUSSIERE
Rôle :
Elle permet d’aspirer la poussière présente sur le sol à l’aide d’une
turbine et de la stocker dans un bac amovible (concept d’aspirateur sans
BAC). Sur la maquette étudiée la turbine et le bac sont remplacés par un
simple ventilateur.
MESURER LE TAUX DE REMPLISSAGE DU BAC
Rôle :
Elle permet à l’aspirateur, de déterminer le taux de remplissage du bac
à poussière, en mesurant la dépression présente à l’entrée de la turbine
( Etude de la carte 3).
ASSURER L’ ALIMENTATION DES FONCTIONS
Rôle :
Elle permet d’assurer l’alimentation électrique autonome de l’aspirateur.
Elle délivre les différentes tensions d’alimentation nécessaires au
fonctionnement de l’aspirateur.
2) Le Bus I2C
Pour communiquer avec les composants de la carte, le Trilobite utilise le Bus
I2C, un protocole de communication qui permet au different composant de
communiquer entre eux.
Le bus I2C utilise deux lignes ( SDA+SCL) + la masse :
SDA : signal de donnée
SCL : signal d’horloge
La masse : signal de référence électrique.
2-1) Transmission de donnée
Le bus I2C utilise une adresse pour chaque composant. Il échangé les
données très rapidement, de 100 kbps (
standard mode
) à 3.2 Mbps (
high-
speed mode
), puis est bi-directionnel. Cela veut dire qu’il peut écrire, mais
aussi lire les données.
FP9
FP10
FA

La donnée est envoyer par le Maître ou par l’esclave ( Cela dépens si on est
en lecture ou en écriture).Lorsque l’esclave a perçue la donnée envoyer par le
Maître ( On prend pour cette exemple le mode écriture ), il va donc imposer
un niveau « 0 » pour montrer que la transmission s’est déroulée correctement.
2-2) L’acquittement ( ACKNOWLEDGE )
L’acquittement, aussi appelé ACK ( les trois premières lettres du mot
Acknowledge en anglais), et le bit de validation. Il permet de savoir si la
transmission de l’octet s’est bien déroulé, que ce soit en mode écriture ou
lecture.
2-3) Transmission d’une adresse
La transmission d’adresse est importante lorsque qu’il y a
beaucoup de composant. Une adresse est donc défini pour chacun d’eux pour
pour pouvoir les sélectionner, qui est disponible dans leur doc.constructeur.
Le Maître va envoyer l’adresse du composant avec qui il veut travailler. Sur le
8eme bit, il va envoyer le bit R/W (
Read ou Write // Lecture ou écriture
).
Cela sera défini par l’état de ce bit :
Bit a 0 -> Mode écriture
Bit a 1 -> Mode lecture
Lorsque l’adresse a été reconnu par le composant l’esclave, il envoie donc un
ACK pour valider la transmission.
/!\ Le maitre n’est pas obliger d’attendre le ACK pour envoyer le Bit R/W /!\
2-4) Exemple
1° - Le Maître ( SDAM) envoi la
donnée au périphérique avec qui il
veut travailler.
2° L’esclave impose un etat bas sur
sa ligne pour dire que la transmission
a été validé.
3° ce bit est perçue par le maitre par
un etat haut sur sa ligne.
Ce bit est appelé ACK.
 6
7
8
9
6
7
8
9
1
/
9
100%