be asservissement de la position d`une bille sur un rail

1/8
CASTEL Philippe 2A Energie
JOUSSERAND Stéphane série C
B
BE
E
A
AS
SS
SE
ER
RV
VI
IS
SS
SE
EM
ME
EN
NT
T
D
DE
E
L
LA
A
P
PO
OS
SI
IT
TI
IO
ON
N
D
D’
’U
UN
NE
E
B
BI
IL
LL
LE
E
S
SU
UR
R
U
UN
N
R
RA
AI
IL
L
REGLAGE DE LA BOUCLE DE COURANT
OBJECTIFS
En utilisant un correcteur de type PI on souhaite régler l’asservissement
en courant du moteur à courant continu.
Le temps de réponse devra être négligeable devant la dynamique
mécanique du système.
MODELISATION
Dans cette première partie on s’attache à modéliser le moteur à courant continu
Equations temporelles
Transformées de Laplace des équations
U(t) = E(t) + R* Im (t) + L*d Im /dt
U(p) = E(p) + R*Im(p) + p*L* Im (p)
E(t) = * m(t)
E(p) = * m(p)
Cm(t)=*Im(t)
Cm(p)=*Im(p)
J*dm/dt = Cm(t) –f*m(t)
p*J*m(p) = Cm(p) –f*m(p)
A partir des équations de Laplace on obtient :
U(p) = * m(p) + ( R* + p*L)* Im (p), d’où :
Φ*Ωm(p)U(p)*
p*LR
(p)
1
Im
et
p*J*m(p) = Cm(p) –f*m(p), d’où :
)Im*
1(p*Φ
p*Jf
Ωm(p)

2/8
On a alors le schéma bloc suivant :
U(p) vitesse
courant
Im Couple
Cm
E(p)
PHI
1
L.s+R
PHI
1
J.s+f
En replaçant le schéma fonctionnel du moteur au sein de la boucle de
commande on obtient :
U(p)
vitesse
courant
Im
Couple
Cm
E(p)
Consigne
UIm
UcI MOTEUR
PI
correcteur
1
L.s+R
PHI
1/Ki
PHI
1
J.s+f
constante de temps électrique =L/R = 3 ms
constante de temps mécanique = J/f = 65 ms
La constante de temps électrique (celle du courant) est très petite par
rapport à la constante de temps mécanique. On peut donc considérer que durant
l’établissement du courant dans la MCC, le système liant la tension appliquée au
courant est un système du 1er ordre.
On peut assimiler la déformation du courant du à la constante de temps
mécanique a une perturbation, pendant le temps de l’établissement du courant.
U(p)
vitesse
courant
Im
Couple
Cm
E(p)
Consigne
UIm
UcI
PERTURBATIONS
PI
correcteur
PHI
1
L.s+R
PHI
1/Ki
1
J.s+f
calcul de la fonction de transfert :
Ki
p
R
LRpTpi
KpiFTBO 1
*)
*1 1
*
1
(*)
*
1
1(*
d’où
)
*1 1
*
1
(*)
*1*
(* p
R
LRpTpipTpi
Ki
Kpi
FTBO

3/8
En choisissant Tpi=L/R, on supprime un pôle stable de la FTBO, on a alors :
pTpiRKi Kpi
FTBO ***
la FTBF est alors :
p
KTKR K
FTBF
pi
pii
i..
1
Elle correspond bien à la fonction de transfert d’un système du 1er ordre, avec :
une constante de temps :
pi
pii
KTKR ..
un gain statique :
KiKs
REGLAGE DU CORRECTEUR
Pour l’étude de la boucle de courant on peut négliger pendant les premiers
instants la constante de temps mécanique.
Uc UIm
1/ki
Uim =f (Im)
PID
PI
1
L.s+R
I = f (U,E)
Le système étant du 1er ordre, il est toujours stable. Nous allons donc
rechercher un réglage du correcteur permettant d’obtenir un temps de réponse
faible afin de respecter les objectifs.
Le temps de réponse d’un système du 1er ordre est égal à 3*, avec dans
notre cas
Kpi
TpiKiR**
D’après les objectifs fixés au paragraphe 5.1, on souhaite que le temps de
réponse soit rapide par rapport à l’asservissement de l’angle du rail, lui même
devant être rapide par rapport à la période d’échantillonnage de 200 ms.
En fixant un rapport de 10 entre chaque temps, on obtient un temps de
réponse à 5% pour la montée du courant de l’ordre de 1 ms.
Il nous reste un paramètre de réglage (Kpi) pour régler la rapidité du
système. Ainsi on peut déterminer Kpi :
3^10 **
*3
TpiRKi
Kpi
application numérique :
Tpi = 3*10-3 ; R = 1/3 ; Ki = 1,6 A/V ; Kpi = 4,8

4/8
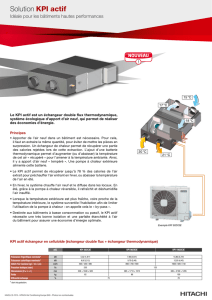
SIMULATION
AVEC DISPOSITIF DE COMMANDE
U(p) vitesse
courant
Im Couple
Cm
E(p)
Consigne
UIm
UcI
MOTEUR
Step
Scope
PID
PI
1
10^-3s+1/3
0.026
1/1.6
0.026
1
0.46*10^-4s+0.7*10^-4
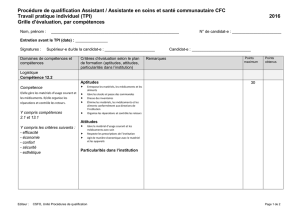
0 0.5 1 1.5 2 2.5 3
x 10-3
0.0188
0.2188
0.4188
0.6188
0.8188
1.0188
1.2188
1.4188
1.6188
temps (s)
COURANT
échelon de consigne
temps de réponse à 5%
On retrouve la valeur du gain statique Ks = Ki = 1.6
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
temps (s)
consigne
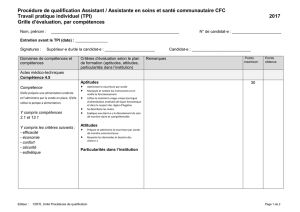
AVEC DISPOSITIF DE COMMANDE
COURANT
TENSION

5/8
0 1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
0.8
1
temps (s)
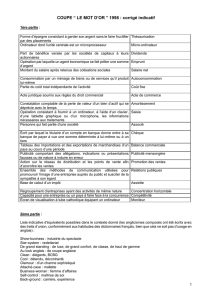
AVEC DISPOSITIF DE COMMANDE
VITESSE
On remarque que le temps de réponse de la vitesse est d’environ 3 s.
Sur une durée de 1 ms et pendant le régime transitoire la vitesse est quasi
nulle.
Cela justifie la simplification faite précédemment qui était de négliger la
partie mécanique dans la modélisation du réglage de la boucle de courant.
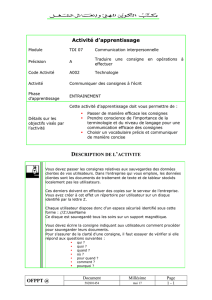
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
temps (s)
PHASE 2
PHASE 1
TENSION
COURANT
CONSIGNE
VITESSE
erreur de traînage
vitesse nulle
 6
7
8
6
7
8
1
/
8
100%