Le fonctionnement de la montre à quartz I / Du Quartz au signal

Le fonctionnement de la montre à quartz
I / Du Quartz au signal électrique
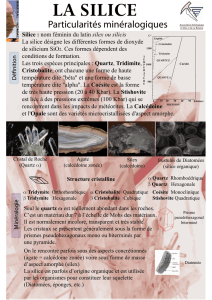
1. Un minéral : le quartz
a) Composition
Le quartz ou silice cristallisée compose environ 16,2% de l'écorce terrestre : elle
représente 75% des roches sédimentaires et est aussi présente dans les roches
magmatiques.
Sa formule chimique est SiO2 (dioxyde de silice). A l'état naturel, il se présente
généralement sous forme d'héxagone terminé par deux pyramides complexes. Si le est
pur, il est pratiquement incolore. Si, dans sa composition, il y a la présence d'autres
cations que Si4+, le quartz peut être alors rose, pourpre, violet, jaune, ou encore brun.
Doc.1 : photographie d'un cristal de quartz.
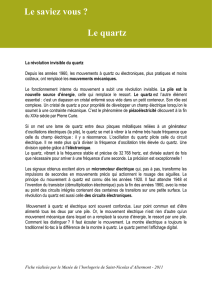
b) Pourquoi utiliser le quartz ?
Le quartz peut être de nature différente suivant la pression et la température du milieu
extérieur. Ainsi, par exemple, le quartz-α, qui est une variété stable du quartz à basse
pression et à basse température, se transforme, à partir de 573°, en quartz-β. En
horlogerie, le quartz-α est utilisé. Le quartz-α ainsi que les autres variétés du quartz
présentent de nombreuses qualités comme l'inaltérabilité, la solidité, un coefficient
élastique important, des frottements internes extrêmement faibles, le fait qu'il soit
piézo-électrique... Tout ceci facilite la propagation ou la créations des vibrations suivant le
résultat recherché. Plus le quartz est de petite taille, plus sa fréquence de résonnement
est précise et ne varie pas au cours du temps.
Ce cristal est aussi utilisé pour des raisons économiques : son abondance dans l'écorce
terrestre le rend peu cher.

2. La Piézo-électricité
a) Définition
La piézo-électricité est un phénomène propre à certains types de cristaux. Il apparaît à la
surface de ces corps, quand on les soumet à des pressions ou à des charges électriques
(effet "direct"). Inversement, l'application d'une tension électrique sur ces mêmes surfaces
donne lieu à une modification des dimensions des cristaux (effet "inverse"). Il y a là un
moyen de transformer un signal électrique en déformation mécanique et réciproquement.
Ce phénomène, combiné aux propriétés de résonance mécanique des cristaux, permet
d'obtenir des vibrations électriques ou mécaniques, à l'origine de nombreuses
applications pratiques.
b) Phénomène
Les variations des grandeurs électriques et mécaniques sont exactement proportionnelles
et les constantes qui relient ces grandeurs l'un à l'autre sont identiques, qu'il s'agisse de
l'effet direct ou de l'effet inverse. Un système d'équations linéaires décrit donc ces deux
effets (les oscillations engendrent un courant alternatif de même fréquence que les
vibrations).
Certains cristaux ne peuvent présenter d’effet piézo-électrique : ce sont ceux qui, au
niveau de l’arrangement atomique élémentaire, possèdent un centre de symétrie. La
figure 1 représente schématiquement un tel arrangement de particules chargées non
déformé, puis déformé par compression ou cisaillement. Le centre de gravité des
particules + et des particules - reste identique. Il ne peut donc en aucun cas y avoir
apparition d’une polarité résultante à la surface du domaine.
Figure1 : http://www.futura-sciences.com/comprendre/d/images/tpe1/sanscentre.gif
En revanche, la piézo-électricité apparaît dans les cristaux qui ne possèdent pas de
centre de symétrie. La figure 2 en donne une image qui, d’ailleurs, correspond
grossièrement à l’arrangement cristallin dans le quartz. Une compression ou un
cisaillement dissocie les centres de gravité des particules + et des particules -. Il y a
apparition d’un dipôle élémentaire, ce qui se traduit au niveau macroscopique par la

polarisation des surfaces du cristal.
Figure2 : http://www.futura-sciences.com/comprendre/d/images/tpe1/aveccentre.gif
3. L'utilisation de la piézo-électricité par
le quartz
a) Nécessité d'un usinage : la transformation en
résonnateur
Pour optimiser ses propriétés piézo-électriques, le quartz à l'état brut doit être usiné de
manière précise.
http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz1.gif
Figure 1 : http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz2.gif
L’utilisation du quartz impose que le cristal soit découpé en lames d’où seront tirés des
parallélépipèdes, des cylindres et des lentilles dont les dimensions définiront les
propriétés vibratoires. De toute façon, ces lames doivent être très précisément orientées
par rapport aux axes cristallographiques du cristal.
On appelle axe Z, ou axe optique, l’axe de symétrie d’ordre 3, parallèle à la longueur du
quartz. Aucune propriété piézo-électrique ne lui est associée. L’axe X (électrique) et l’axe
Y (mécanique) sont dans un plan perpendiculaire à Z. Il existe 3 axes X et 3 axes Y
déduits les uns des autres par rotation de 120° autour de Z (fig. 1). C’est par rapport à
ces axes que sont définies les « coupes » utilisées pour les applications principalement
électroniques du quartz, qui sont baptisés (X, Y, AT, CT,... ).
Schéma : exemple d'usinages.
http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz3.gif
Une lame de quartz piézo-électrique, de coupe et de dimensions particulières, possède
un certain nombre de fréquences de résonances mécaniques propres. L'ordre de
grandeur de la fréquence de résonance propre est en effet en grande partie déterminé
par la coupe.

b) Fonctionnement
Les trois types d'ondes stationnaires pouvant se propager à l'intérieur du cristal sont la
flexion, le cisaillement de surface et l'élongation. L'onde résultante est une combinaison
de ces trois types d'ondes.
Quartz vibrant en flexion et en cisaillement :
http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz4.gif
http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz5.gif
On rencontre principalement trois formes de résonateur :
Les barreaux vibrant en flexion plane ou en extension. Il vibre autour des nœuds
sur lesquels il est fixé. La longueur du barreau est de l'ordre de la longueur d'onde.
Cette forme de résonateur tend à disparaître.
Le diapason mince découpé en forme de U. Son épaisseur est faible (environ 0.1
mm) et il est métallisé sur une seule face. Le matériau le plus utilisé pour le
recouvrir est l'or. Son intérêt provient de son mode de fabrication proche des
méthodes utilisées pour les circuits intégrés : on découpe chimiquement plusieurs
centaines de Quartz à partir d'une plaquette sur laquelle les diapasons ont été
tracés.
Les plaques vibrant en cisaillement d'épaisseur (elles sont généralement circulaires)
Schéma : http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz-scan.gif
Schéma récapitulatif des différentes formes de résonnateurs
http://www.futura-sciences.com/comprendre/d/images/tpe1/quartz6.gif
Dans chaque cas, on positionne des électrodes, nécessaires à l'excitation du cristal

piézo-électrique.
c) Mode de vibration
Une lame de quartz piézo-électrique, de coupe et de dimensions particulières, possède
un certain nombre de fréquences de résonance mécanique propres. Cette lame peut être
excitée par une tension alternative appliquée à des électrodes déposées sur elle, de
manière qu’une de ces résonances soit privilégiée. On rappelle que les principaux modes
de vibration utilisés sont la flexion, l’élongation, le cisaillement de surface et le
cisaillement d’épaisseur. La flexion correspond à des fréquences de vibration basses (de
1 à 100 kHz en pratique) et est appliquée aux coupes X et NT. La fréquence obtenue est
de la forme : F = K1W/l (W = largeur, l = longueur) (fig. 4a et c). L’élongation appliquée
aux coupes X produit des fréquences dans la gamme des 50 à 200 kHz, suivant la loi : F
= K2/l (fig. 4b). Le cisaillement de surface correspond, pour les coupes CT et DT, à des
fréquences de 200 à 800 kHz, suivant la loi : F = K3/W. Le cisaillement d’épaisseur
permet l’obtention de fréquences élevées allant de 0,8 à 30 MHz (suivant le mode
fondamental), et jusqu’à 150 MHz (en excitant le cristal suivant un harmonique
mécanique). Il s’applique aux coupes AT et BT principalement (fig. 4d).
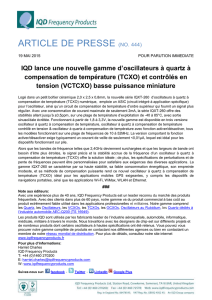
2 / Du signal électrique au signal mécanique
1. Le Diviseur de fréquence
Le quartz produisant un signal d'une fréquence de 32768Hz (soit 2^15), il est nécessaire
d'avoir ensuite un montage diviseur de fréquence, pour obtenir en sortie un signal de
fréquence plus faible, pour la commande du moteur pas-à-pas.
Pour cela, il faut utiliser différents circuits faisant parties des circuits élémentaires de
l'électronique, et notamment des bascules D et des portes inverseuses (Il existe d'autres
manières, mais celle-là a l'avantage d'être simple, et de ne nécessiter que deux portes
par division).
En fait, le but de ce circuit va être de faire des opérations "modulo" 2, pour diviser le
signal par deux à chaque passage.
Pour la commande du moteur pas-à-pas, on aura besoin d'un signal de 2Hz.
On obtient donc un montage semblable à celui-ci :
 6
7
8
6
7
8
1
/
8
100%