1 - Accueil

STI
TD DYNAMIQUE – Véhicule CLEVER
M5
Nom :
Prénom :
Date :
1
I
I
I
-
-
-
P
P
Pr
r
ré
é
és
s
se
e
en
n
nt
t
ta
a
at
t
ti
i
io
o
on
n
n
:
:
:
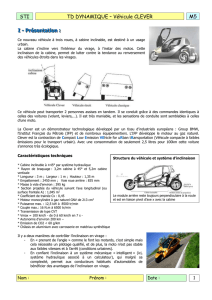
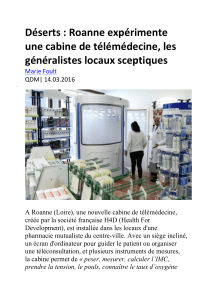
Ce nouveau véhicule à trois roues, à cabine inclinable, est destiné à un usage
urbain.
La cabine s’incline vers l’intérieur du virage, à l’instar des motos. Cette inclinaison
de la cabine, permet de lutter contre la tendance au renversement des véhicules
étroits dans les virages.
Ce véhicule peut transporter 2 personnes assises en tandem. Il se conduit grâce à des commandes identiques à
celles des voitures (volant, leviers,…). Il est très maniable, et les sensations de conduite sont semblables à celles
d’une moto.
La Clever est un démonstrateur technologique développé par un tissu d'industriels européens : Group BMW,
l'Institut Français du Pétrole (IFP) et de nombreux équipementiers. L'IFP développe le moteur au gaz naturel.
Clever est la contraction de Compact Low Emission VEhicle for uRban tRansportation (Véhicule compacte à faibles
émissions pour le transport urbain). Avec une consommation de seulement 2,5 litres pour 100km cette voiture
s'annonce très écologique.
Caractéristiques techniques
* Cabine inclinable à ±45° par système hydraulique
* Rayon de braquage : 3,2m cabine à 45° et 5,2m cabine
verticale
* Longueur : 3 m ; Largeur : 1 m ; Hauteur : 1,35 m
* Empattement : 2450 mm ; Voie roue arrière : 835 mm
* Masse à vide d’environ : 395 kg
* Section projetée du véhicule suivant l’axe longitudinal (ou
surface frontale A) : 1,045 m2
* Coefficient de trainée Cx : 0,45
* Moteur monocylindre à gaz naturel GNV de 213 cm3
* Puissance max. : 12,5 kW à 8500 tr/min
* Couple max.: 16 N.m à 6500 tr/min
* Transmission de type CVT
* Vmax = 100 km/h - de 0 à 60 km/h en 7 s -
* Autonomie d’environ 200 km –
* Emission de CO2 < 60 g/km
* Châssis en aluminium avec carrosserie en matériau synthétique
Il y a deux manières de contrôler l’inclinaison en virage :
- En « prenant de l’angle » comme le font les motards, c’est simple mais
cela nécessite un pilotage qualifié, et de plus, la moto n’est pas stable
aux faibles vitesses et à l’arrêt (conditions urbaines).
- En confiant l’inclinaison à un système mécanique « intelligent » (ici,
système hydraulique associé à un calculateur), qui malgré sa
complexité, permet aux conducteurs habituels d’automobiles de
bénéficier des avantages de l’inclinaison en virage.
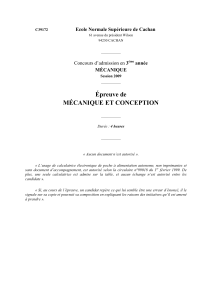
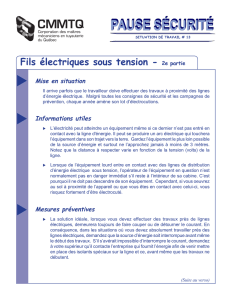
Structure du véhicule et système d’inclinaison
Le module arrière reste toujours perpendiculaire à la route
et est en liaison pivot d’axe x avec la cabine

STI
TD DYNAMIQUE – Véhicule CLEVER
M5
Nom :
Prénom :
Date :
2
TRAVAIL DEMANDE :
On se propose de comparer le comportement en virage d’un véhicule CLEVER par rapport à
un véhicule « étroit rigide » et de vérifier que le système d’inclinaison ne pénalise pas les
performances du véhicule.
1ère partie : Etude du comportement en virage pour les véhicules « classique » et « étroit » à 4 roues.
But : déterminer les vitesses théoriques en virage, avant glissement ou renversement, pour ces 2 véhicules.
11 – Un véhicule classique (2) parcourt la courbe T à la vitesse v, dans le repère R(O,X1,Y1,Z1) lié à la terre (1)
Notations :
11-1 Exprimer la norme du vecteur vitesse VG2/1 du centre de
gravité du véhicule par rapport au sol, notée v.
Tracer sur la figure le vecteur vitesse VG2/1
11-2 Exprimer la norme des composantes tangentielle at et
normale an du vecteur accélération AG2/1
Tracer sur la figure le vecteur accélération AG2/1 et ses
composantes normale et tangentielle.
12 – Le véhicule « classique » (2) de masse m est modélisé
ci-dessous. Il parcourt sur une route horizontale, la courbe T à une vitesse v constante, donc AG2/1 = an
12-1 Isoler le véhicule « classique » (2)
Faire le bilan des actions extérieures qui agissent sur le système isolé.
Appliquer le principe fondamental de la dynamique au point G et écrire les 3 équations scalaires qui en résultent.
On admet que le moment dynamique au point G est nul (G2/1=0).
12-2 Etude du glissement
Il y a « équi-adhérence » aux contacts roues/sol, et le véhicule est à la limite de l’adhérence.
Les 2 équations correspondantes sont : YA = t . ZA et YB = t . ZB
Le facteur d’adhérence transversale est t = tan = 0,9 (pneus neufs, chaussée sèche).
Déterminer l’expression de la vitesse v en fonction des paramètres t, r , g.

STI
TD DYNAMIQUE – Véhicule CLEVER
M5
Nom :
Prénom :
Date :
3
12-3 Etude du renversement
A l’instant de l’étude YA = ZA = 0
Déterminer v en fonction des paramètres b, h, r, g.
12-4 Les caractéristiques du véhicule « classique » sont : voie b = 1,45m et hauteur h = 0,65m.
Compléter le tableau ci-après (voir 21-1) en calculant les vitesses maxi du véhicule « classique » pour le non
glissement et le non renversement.
13- Le modèle choisi et les équations précédemment restent valables pour le véhicule « étroit » pour le non
glissement et le non renversement.
Comparer les valeurs des véhicules « classique » et « étroit ».
2ème partie : Etude du comportement en virage d’un véhicule « Clever » à cabine inclinable.
But : déterminer les vitesses théoriques en virage, avant renversement, pour le « Clever »
21 – Le véhicule « Clever » (2) de masse m est modélisé ci-dessous. Il parcourt sur une route horizontale, la
courbe T à une vitesse v constante, donc AG2/1 = an
Hypothèses complémentaires :
La roue avant centrale du véhicule Clever n’est pas prise en compte dans cette première étude.
Le véhicule est constitué de la cabine (3) et du module de propulsion (2). L’angle d’inclinaison b entre la cabine (3)
et l’axe vertical est constant. L’ensemble (2+3) constitue un ensemble rigide dans cette étude.
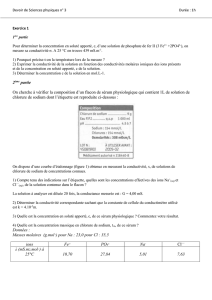
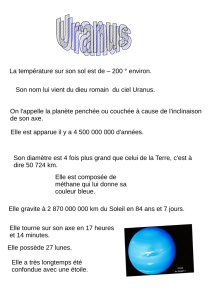
L’étude dynamique montre que, pour éviter le renversement, la relation an ≤ g . (b/2 + e.sin) / (k + e.cos) doit
être vérifiée. Cette relation est tracée sur la figure ci-dessous :
b=AB=1m
e=EG=0,49m
k=EC=0,16m
g=9,81m.s-2

STI
TD DYNAMIQUE – Véhicule CLEVER
M5
Nom :
Prénom :
Date :
4
21-1 Relever les accélérations admissibles pour les angles d’inclinaison = 15°, = 45°.
Calculer les vitesses maxi que le véhicule Clever peut théoriquement atteindre avant renversement pour les virages
de rayon 50m et 20m avec les angles = 15°, = 45°.
21-2 Décrire alors le comportement (glissement et/ou renversement) du véhicule Clever pour une inclinaison
≥15°
Comparer avec les résultats des véhicules « classique » et « étroit ».
Conclure quant à l’utilisation du véhicule Clever.
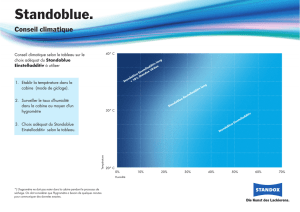
22 – Prise en compte de la géométrie à 3 roues du véhicule Clever.
Le véhicule de masse mT est modélisé ci-dessous
Données :
Coordonnées des points dans le repère (C, X, Y, Z) :
A(0 ;417,5 ;0) B(0 ; -417,5 ; 0) C(0 ; 0 ; 0) D(2450, 0 ; 0) G(820, 340 , 506)
Masse total (Clever+conducteur) : mT = 500kg
Inclinaison Maxi de la cabine : = 45° = cste
Coefficient d’adhérence transversal : t = 0,9
Etude dynamique du véhicule en virage
On se propose de valider les limites de vitesse en virage. Compte tenues des caractéristiques données
par le constructeur et de celles données ci-dessous :
Hypothèses supplémentaires :
Bilan des vitesses admissibles (km/h)
Véhicule
« classique »
Véhicule
« étroit »
Véhicule Clever
Vitesse
glissement
r = 50m
75,6
75,6
75,6
r = 20m
47,8
= 0
= 15°
= 45°
Vitesse
renversement
r = 50m
84,2
69,9
102
r = 20m
44,2
44,2
50,4

STI
TD DYNAMIQUE – Véhicule CLEVER
M5
Nom :
Prénom :
Date :
5
Masse de l’ensemble mobile : 480 Kg
Coefficient de frottement au contact des roues sol : = 0,85
CE = 0,25 m EG = 0,52 m (=0°) AB = 0,835 m CD = 2,45 m
Le point E est la projection de G sur CD quand l’angle vaut 0°
Angle d'inclinaison de 45°
Les différentes cotes sont données par la figure 6 ci-dessus :
1. Ecrire le principe fondamental de la dynamique appliqué au véhicule incliné d’un angle de 45°, lors
d’un virage (on supposera que le centre de gravité G décrit un cercle de rayon R), dans un repère
terrestre supposé galiléen (axe z vertical).
2. Donner l’équation permettant de déterminer la relation vitesse du point G = f(R) vérifiant le non
basculement du véhicule.
3. Donner l’équation permettant de déterminer la relation vitesse du point G = f(R) vérifiant le non
glissement du véhicule.
4. Tracer les courbes et les commenter, en fonction des caractéristiques données par le constructeur.
Etude de l’ensemble de basculement du véhicule
On se propose de valider les choix du constructeur pour l’inclinaison du module avant.
Le système d’inclinaison de la cabine est assuré par un système mécanique « Intelligent » constitué d’un
circuit hydraulique et d’un calculateur. Deux vérins hydrauliques positionnent la cabine à
l’inclinaison demandée (cf. figure 7).
 6
7
6
7
1
/
7
100%