a ) On considère une courbe plane C paramétrée par M

ANNEXES 1, 2 et 3 DU TEXTE : QUELQUES ELEMENTS DE BASE DE LA
TRIGONOMETRIE ET DE LA GEOMETRIE HYPERBOLIQUES
PLAN DE CES ANNEXES
ANNEXE 1 : DEUX CALCULS D’AIRES
ANNEXE 2 : LES METRIQUES RIEMANNIENNES
ANNEXE 3 : QUELQUES COMMENTAIRES D’UN TEXTE DE FELIX KLEIN
BIBLIOGRAPHIE
ANNEXE 4 : QUELQUES PROPRIETES DES INVERSIONS
ANNEXE 5 : LES QUATRE MODELES PRESENTES SONT ISOMETRIQUES
ANNEXE 6 : PREUVE DE L’EGALITE DES TROIS DISTANCES INITIALES AVEC DIST4
ANNEXE 7 : LES GEODESIQUES DES MODELES PRESENTES
PARTIE A : ANNEXES 1, 2 et 3
ANNEXE 1 DEUX CALCULS D’AIRES
CALCUL 1
Ce calcul n’est que peu détaillé sur le site de Serge Mehl.
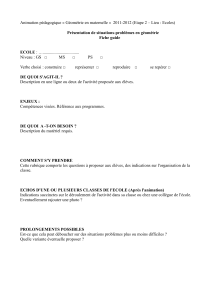
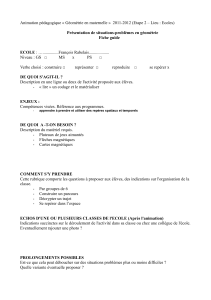
On désigne par E et F les aires indiquées ci-contre. On
va montrer que E =
2
a
.
E + F (aire d’un triangle) vaut :
1
22x
x
.
F =
dtt
x
1
21
=
dt
t
t
t
x
1
21
.
On l’intègre par parties :
t
t
tv
ttu
1
)(
)('
2
1
1
1.1.
1
)('
2/)(
22
2
2
2
2
tt
t
tt
t
t
tv
ttu
.
(
'v
n’est pas définie au point 1 et on aurait un problème en classe de terminale)
F =
dtt
x
1
21
=
x
t
t
1
21
2
2
1
dt
t
x
121
1
.
Or (
)')1( 2 ttLn
=
1
1
1
1
1
22
2
ttt
t
t
. On a donc
F =
dtt
x
1
21
=
x
ttLnt
t
1
22 )1(
2
1
1
2
)1(
2
1
1
222 xxLnx
x
donc E = E + F – F =
)1(
2
12 xxLn
.
Par ailleurs
2
aa ee
achx
. On pose
a
eX
. On a alors
X
Xx 1
2
et
012
2 xXX
d’où
1
2 xxX
ou
1
2 xxX
.
Notons que
0a
donc que
a
eX
> 1.

Le produit des deux nombres positifs
1
2 xx
et
1
2 xx
vaut 1 donc seul le plus grand
des deux, c’est à dire
1
2 xx
dépasse 1. On a donc
1
2 xxX
et
)1( 2 xxLnXLna
d’où E =
2
a
.
CALCUL 2
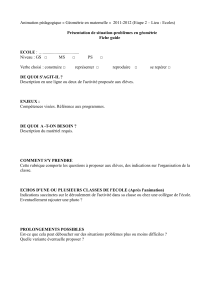
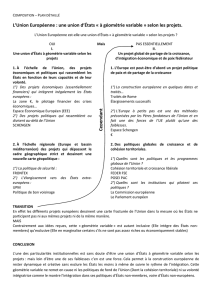
VISUALISATION DE LA DISTANCE DE KLEIN A L’AIDE DU MODELE DE MINKOVSKI POUR UN
PLAN NON VERTICAL.
1 )
P est un plan passant par O coupant le
plan (xOy) suivant une droite D. On
désigne par P’ le plan vertical contenant
D et par a l’angle entre les plans P et P’.
0 < a <
.4/
La base initiale de l’espace étant notée
);';'( kji
, on prend
);;( kji
pour
nouvelle base orthonormée (directe sur le
dessin mais c’est sans importance car on
n’oriente pas les angles) de l’espace avec
j
dirigeant D.
Une équation de P’ est
0x
Soit
u
un vecteur tel que
);( uj
est une base orthonormée de P et
0
'
S
x
.
. Soit
),,( zyxM
un point de P
H .
Soit
at 2/
.
2/4/
t
.
(à vrai dire on aurait pu se passer de cette nouvelle variable et faire
tous les calculs avec a)
ktitu sincos
et une équation de P est
xtz )(tan
donc
kzjyixOM
=
kxtjyix )(tan
=
))(tan( ktixjy
=
u
t
x
jy cos
.
222 1yxz
(et
0z
) est encore une équation de H car la nouvelle base est déduite de
l’ancienne par rotation autour de l’axe (Oz). On a donc
2222 1)(tan yxxt
d’où
222 1)1(tan ytx
et
2222 1)cos(sin)
cos
(ytt
t
x
, soit :
)1(
)2cos(
1
)
cos
(22 y
tt
x
.
);( uj
est une base de P et
OM
u
t
x
jy cos
.
Une équation dans P de P
H est donc, avec
0Y
,
)1(
)2cos(
122 X
t
Y
.
2 )
Par ailleurs on a S’ (
'' )(tan,0, SS xtx
) avec (
'
)(tan S
xt
)2 =1+
2'S
x
donc
2'S
x
=
tt t
t22
2
2cossin cos
1tan 1
.
0
'
S
x
donc
)2cos(
cos
't
t
xS
et
)2cos(
sin
't
t
zS
.

On a donc dist5(
',SM
) = Arg ch (
)2cos(
cos.
)2cos(
sin.)(tan
t
tx
t
txt
)= Arg ch (
)
)2cos(.cos
)cos.(sin 22
tt
ttx
=
Arg ch (
t
tx
cos
)2cos(.
) = Arg ch (
t
tz
sin
)2cos(.
) = Arg ch (
a
az
cos
)2cos(
).
3 )
C’est la situation vue dans le
texte :
A =
2/
et Arg ch Y =
= 2A.
On en déduit pour une
constante c : A’ = c.
2/
et
Arg ch (Z/c) =
c
A'2
La représentation de P
H
dans P avec c =
)2cos(
1t
.
L’expression dist5(
',SM
) = Arg ch (
t
tx
cos
)2cos(.
) nous montre donc que cette distance vaut
.)2cos('.2)2cos('.(2
'2 aAtA
c
A
Pour voir la distance entre M et S’, il faut donc multiplier l’aire « sous la courbe » par
)2cos( a
.
ANNEXE 2 : LES METRIQUES RIEMANNIENNES
Les passages déjà écrits dans le texte initial sont en caractères normaux,
les passages supplémentaires sont en caractères gras.
a ) On considère d’abord une courbe C dans le plan euclidien muni d’un repère
orthonormé, C étant paramétrée par
u
M(
u
) (
f
(
u
) ;
g
(
u
)) avec
u
[0 ;
[ et
f
et
g
continûment différentiables (dans tout ce qui suit, les fonctions sont supposées
être assez régulières).
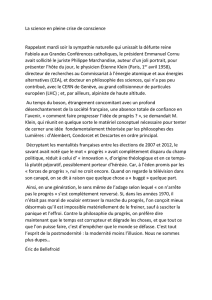
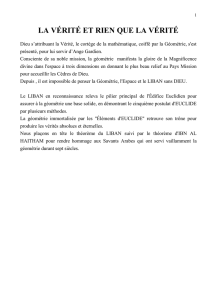
Par définition, la longueur L de la courbe correspondant à l’intervalle
[0 ;
t
] est la borne supérieure des longueurs polygonales du type ci-
contre.
On peut montrer, un peu péniblement, voir un cours de premier cycle, que L = s(
t
)
=
tduuOM
0)('
=
tduuguf
0
22 )(')('
, ce nombre ne dépendant pas du paramétrage
de C.

En effet,
s
est définie par
0)0( s
et
22 )(')(')(' tgtfts
.
On obtient L en ajoutant « une infinité de longueurs
infinitésimales » de tangentes (rectilignes).
En d’autres termes : en paramétrant C par M (
))();(uyux
, calculer la longueur (euclidienne)
de C, c’est intégrer
22 dydxds
le long de C.
Pour une courbe de l’espace IR3, on a une troisième fonction coordonnée
h
et la formule
222 )(')(')(')(' thtgtfts
. ( * )
b ) Une surface S de l’espace euclidien IR3, supposée assez régulière, est, au moins
localement, paramétrée par deux nombres
u
et
v
( par exemple la latitude et la longitude
pour une sphère ou bien les variables
x
et
y
si S est définie par une relation du type
),( yxfz
) :
),( vu
M(
),vu
où les coordonnées de M sont données par
),( vufx
,
),( vugy
et
),( vuhz
,
u
et
v
variant dans des intervalles.
On obtient une courbe C tracée sur S en prenant pour
u
et
v
des fonctions (régulières)
de
t
,
t
variant dans un intervalle. Pour calculer la longueur de C à l’aide de la formule (
* ), on y remplace
)(tf
,
)(tg
et
)(th
par
))(),(( tvtuf
,…Ainsi
),('.')('.')(' tvftuftf vu
…
On obtient alors facilement
222 ))('.()(').('.2))('.())('( tvGtvtuFtuEts
où
FE,
et
G
sont définies par
2'2'2' )()()( uuu hgfE
,
'''''' ... vuvuvu hhggffF
et
2'2'2' )()()( vvv hgfG
.
En notant
dt
d
la dérivée
)(' t
, ceci s’écrit
2
ds
=
22 2GdvFdudvEdu
.
On obtient la longueur (euclidienne) de C en intégrant
22 2GdvFdudvEduds
le long
de C, où
FE,
et
G
sont des fonctions de
vuhgf ,,,,
et
t
.
c ) C’est Riemann qui a proposé, pour une surface abstraite définie par deux paramètres mais
non nécessairement plongée dans IR3, de remplacer
22 dydx
par une expression quelconque
du type
2
ds
=
22 2GdyFdxdyEdx
où
FE,
et
G
sont des fonctions régulières de
x
et
y
vérifiant les conditions
0,0 GE
et
0
2 FEG
qui assurent que la forme quadratique
considérée, à la place de la forme euclidienne
22
),( yxyxq
, définit bien un produit
scalaire.
Même pour un génie comme Bernhard Riemann, une telle idée ne tombe pas du ciel ! Il
a été un étudiant de Gauss qui s’intéressait aux surfaces (plongées) dans IR3. Pour avoir
une idée de l’influence de Gauss sur Riemann, il faut rappeler ce qu’est la courbure en
un point d’une surface mais d’abord en un point d’une courbe plane C. La définition
donnée ici n’est pas pratique pour les calculs effectifs mais elle est très parlante.
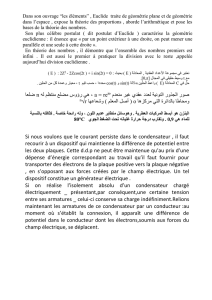
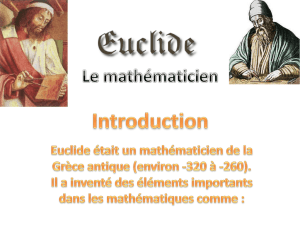
On suppose que t est un paramètre normal de C (c’est à dire
que le vecteur tangent est partout unitaire, autrement dit
que ci-contre
tt '
est la longueur de l’arc MN). La courbure
k entre les points M et N est le quotient a / (t’-t).
Définition 1 : la courbure K au point M est la limite de ce quotient quand t’ tend vers t.

Il importe de noter que si C est un arc de cercle de rayon R, K est constante sur C et
vaut 1/R ou –1/R suivant l’orientation de la courbe et du plan
1
.
Pour un point M d’une surface S, pour tout plan P passant par M et orthogonal au plan
tangent à S en M on peut considérer la courbure en M de la courbe S
P. Euler avait
remarqué que parmi les courbures correspondant à tous les plans P possibles, les deux
valeurs extrémales
2
K1 et K2 correspondent à des plans P1 et P2 orthogonaux.
Définition 2 : le produit K1.K2 est la courbure de S en M.
La définition 1 montre bien que la valeur absolue de cette courbure traduit l’intensité de
la courbure (au sens familier) en M. Pour interpréter son signe, qui, contrairement à
ceux de K1 et K2 , ne dépend d’aucune orientation, on donne son expression qui est
simple dans le cas où S est définie par une relation du type
),( yxfz
:
(on peut d’ailleurs toujours se ramener localement à ce cas avec un changement d’axes :
prendre pour l’axe (Oz) la normale au plan tangent en M )
On a alors K1.K2 =
22'2'
2''''''
))()(1(
)(.
yx
yxyyxx
ff
fff
. Il est facile, en
développant
f
à l’ordre 2, de prouver que ce nombre n’est
négatif que si S traverse son plan tangent en M (on a alors
un point M dit point-selle ou point-col comme ci-contre).
Ce produit K1.K2 est appelé courbure de Gauss en M. En effet, Gauss a montré, c’est
son fameux Theorema egregium (théorème remarquable), datant de 1828, que cette
courbure (qui avait pour lui une autre définition, équivalente), dépendant a priori du
vecteur normal à S en M, peut être calculée, dans le cas général d’une paramétrisation
de S par deux variables
u
et
v
uniquement à l’aide des quantités E, F et G et de leur
dérivées, premières et secondes, par rapport à
u
et
v
. C’est magnifiquement détaillé
dans [5].
On a le même phénomène avec les géodésiques : une définition d’une géodésique d’une
surface S de IR3 est qu’il s’agit d’une courbe tracée sur S pour laquelle en tout point le
vecteur accélération est orthogonal au plan tangent (la courbe « ne part pas vers la
gauche ou vers la droite »); cependant on peut déterminer les géodésiques à l’aide des
seules expressions E, F et G. Ces expressions (et donc
2
ds
) rassemblent donc toute
l’information relative à la surface, laquelle peut alors être considérée comme un objet
indépendant
3
de son plongement dans IR3.
Il en est ressorti pour Riemann (en dimension quelconque ) la notion de surface, définie
par un
2
ds
abstrait, avec, cependant, des préoccupations liées à la physique,
indépendamment de tout plongement dans IR3 ( pour une variété de dimension 2) ou
plus généralement dans IRn.
1
La définition de la courbure d’une courbe plane la plus courante considère la valeur absolue de l’expression
donnée ici; on gagne alors l’invariance par changement d’orientation et surtout la formule k=
/1
où
est le
rayon de courbure en M, c’est à dire le rayon du cercle « le plus proche » de C autour de M, mais on perd un
point essentiel pour ce qui suit : la simplicité de l’interprétation du signe de la courbure en un point d’une
surface.
2
Il s’agit du cas général. Lorsque toutes les courbures en M correspondant à tous les plans P possibles sont
égales, on dit que M est un ombilic, et on peut prouver, c’est intuitivement évident, que si tout point M d’une
surface S de IR3 est un ombilic alors S est une partie d’une sphère.
3
Cette observation est le point de départ de la terrifiante géométrie différentielle « intrinsèque » (voir la
bibliographie) dont il ne sera plus question dans ce qui suit. En formalisant un peu l’existence du paramétrage en
u
et
v
présenté ci-dessus, on obtient la première définition de cette géométrie : celle d’une variété différentiable
de dimension 2.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%