3. Capteurs KNX - Schneider Electric

Spécifications
Schneider Electric - Dieweg 3 - 1180 Bruxelles Page 1 / 101
customer-service.be@schneider-electric.com
www.schneider-electric.be Version 20110912_001_FR
Descriptions du cahier des charges
du système KNX
Table des matières
0. Propriétés système KNX
1. Composants système KNX
1.1. Alimentations bus KNX
1.2. Alimentations bus KNX avec entrée d’alimentation de secours
1.3. Alimentation de secours KNX
1.4. Batterie au plomb pour alimentation de secours
1.5. Coupleur système KNX
1.6. Module logique KNX
1.7. Émetteur IR portable Distance 2010
2. Interfaces et passerelles KNX
2.1. Interface USB
2.2. Télécontrôleur Plus
2.3. Routeur IP KNX
2.4. Passerelle KNX/DALI
3. Capteurs KNX
3.1. Boutons-poussoirs KNX
3.1.1. Boutons-poussoirs KNX System M
3.1.2. Boutons-poussoirs KNX Unica
3.1.3. Boutons-poussoirs KNX Altira
3.2. Boutons-poussoirs KNX avec interrupteurs avec enjoliveurs traditionnels
3.3. Interfaces boutons-poussoirs KNX
3.4. Boutons-poussoirs KNX avec thermostat d'ambiance intégré
3.5. Thermostats d'ambiance KNX avec écran
3.5.1. Thermostats d'ambiance KNX avec écran System M
3.5.2. Thermostats d'ambiance KNX avec écran Unica
3.5.3. Thermostats d'ambiance KNX avec écran Altira
3.6. Thermostat d'ambiance KNX avec entrées binaires System M
3.7. Thermostat d'ambiance KNX sans commande locale System M
3.8. Détecteurs de mouvements KNX encastré
3.8.1. Détecteurs de mouvements KNX ARGUS - encastré System M
3.8.2. Détecteurs de mouvements KNX - encastré Unica
3.8.3. Détecteurs de mouvements KNX - encastré Altira
3.9. Détecteur de présence KNX ARGUS Presence - encastré System M
3.10. Détecteur de mouvements KNX ARGUS 220 – montage apparent
3.11. Détecteurs de présence KNX ARGUS Presence - montage au plafond
3.11.1. Détecteurs de présence KNX ARGUS Presence standard - montage au plafond
3.11.2. Détecteurs de présence KNX ARGUS Presence Master/Slave - montage au plafond
3.11.3. Détecteurs de présence KNX ARGUS Presence avec réglage de la lumière -
montage au plafond
3.12. Modules d'entrées binaires KNX
3.12.1. Module d'entrées binaires KNX pour contacts libres de potentiel
3.12.2. Module d'entrées binaires KNX 24 V c.a./c.c.
3.12.3. Module d'entrées binaires KNX 230 V c.a./c.c.
3.13. Capteur de CO2, d'humidité et de température KNX
3.14. Capteurs météorologiques KNX
3.14.1. Capteur thermique et d'intensité lumineuse KNX
3.14.2. Station météorologique KNX
3.14.3. Station météorologique KNX REG-K
3.14.4. Capteurs pour station météorologique KNX REG-K
3.15. Programmation temporelle KNX
3.15.1. Horloges de programmation KNX
3.15.2. Temporisateur KNX
3.16. Module d'entrées analogiques KNX

Spécifications
Schneider Electric - Dieweg 3 - 1180 Bruxelles Page 2 / 101
customer-service.be@schneider-electric.com
www.schneider-electric.be Version 20110912_001_FR
4. Actionneurs KNX
4.1. Actionneurs de commutation KNX
4.1.1. Actionneurs de commutation KNX 10 A à commande manuelle
4.1.2.Actionneurs de commutation KNX 16 A à commande manuelle
4.1.3. Actionneurs de commutation 16 A à commande manuelle et détection de courant
4.1.4. Actionneurs de commutation KNX 6 A
4.1.5. Actionneurs de commutation KNX encastrés 16 A
4.1.6. Actionneurs de commutation KNX encastrés avec entrées binaires supplémentaires
4.2. Actionneurs de volets/stores et de commutation combinés KNX à commande manuelle
4.3. Actionneurs de volets/stores KNX
4.3.1. Actionneurs de volets/stores KNX 10 A/230 V c.a. à commande manuelle
4.3.2. Actionneurs de volets/stores KNX 6 A/24 V c.c. à commande manuelle
4.3.3. Actionneurs de volets/stores 6 A/230 V c.a.
4.3.4. Actionneur de volet KNX 10 A/230 V c.a. à commande manuelle
4.3.5. Actionneurs de volets/stores KNX encastrés avec entrées binaires supplémentaires
4.4. Actionneurs de variation KNX
4.4.1. Actionneurs de variation universels KNX à commande manuelle
4.4.2. Actionneur de variation RL KNX
4.4.3. Actionneurs de commutation universels KNX encastrés avec entrées binaires
supplémentaires
4.4.4. Actionneurs de variation KNX 0-10 V à commande manuelle
4.4.5. Passerelle KNX/DALI
4.5. Actionneurs KNX pour contrôle de température
4.5.1. Actionneur Fan Coil KNX
4.5.2. Actionneur de chauffage KNX
4.5.3. Actionneur de chauffage KNX encastré avec entrées binaires supplémentaires
4.5.4. Actionneur de chauffage et de volets/stores KNX encastré avec entrées binaires
supplémentaire
4.5.5. Entraînement de vanne thermo-électrique KNX avec entrées binaires
supplémentaires
4.5.6. Entraînements de vanne thermo-électriques
4.6. Actionneurs analogiques KNX
5. Visualisation
5.1. Écran tactile 7" KNX

Spécifications
Schneider Electric - Dieweg 3 - 1180 Bruxelles Page 3 / 101
customer-service.be@schneider-electric.com
www.schneider-electric.be Version 20110912_001_FR
Les propriétés du système KNX
Principe de fonctionnement
KNX se compose d’un double câble de bus et des dispositifs d’installations compatibles, comme des
capteurs, des actionneurs et des composants de système, connectés les uns aux autres.
Les capteurs envoient des informations vers le bus sous la forme d’un télégramme de données. Les
capteurs sont par exemple des modules d’entrée binaires KNX pour contacts sans potentiel.
Des actionneurs reçoivent les télégrammes de données et les convertissent par exemple en actions de
commutation ou de modulation.
Afin de réaliser les fonctionnalités de base, des dispositifs et des composants système sont nécessaires.
Ceux-ci se composent essentiellement d’unités d’alimentation, qui acheminent la tension suffisante au bus,
de coupleurs permettant de relier les différents segments du bus et d’interfaces, pour la programmation des
différents dispositifs.
Aussi bien la puissance nécessaire aux composants électriques des bus, que les informations transmises
sous la forme de télégrammes de données, sont envoyées par l’intermédiaire d’un double câble de bus. Le
câble de bus relie chaque composant du bus. Dans la plupart des cas, les capteurs n’ont besoin que d’un
seul câble de bus pour fonctionner. En revanche, les actionneurs ont généralement besoin d’une connexion
à un réseau 230/400V pour l’acheminement de la charge. Le câble de bus et le réseau 230/400V sont
strictement séparés l’un de l’autre.
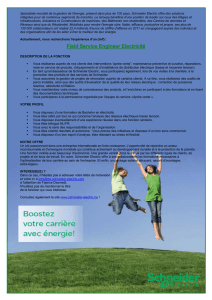
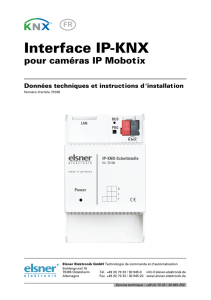
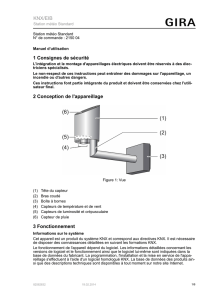
Les capteurs et les actionneurs sont sélectionnés
indépendamment de l’application requise et se
composent d’un coupleur de bus et d’un module
d’application avec programme d’application
correspondant. Les programmes d’applications
font partie de la base de données produits de
Schneider Electric. Ils peuvent être téléchargés
dans les dispositifs concernés à l’aide du logiciel
ETS par le biais d’une connexion PC USB, RS232
ou Ethernet.
KNX est un système de bus décentralisé. Chaque
dispositif KNX dispose de son propre contrôleur de
périphérique microprogrammé. Les dispositifs
peuvent échanger directement des informations,
sans nécessiter d’unité centrale, au moyen des
bus sériels. Tous les dispositifs sont des appareils
de bus de même valeur (fonctionnement multi-
master). Afin d’éviter la collision de télégrammes et l’endommagement de données, la procédure CSMA/CA
est utilisée.
KNX travaille à l’aide d’une tension de sécurité très faible (TSTF). La tension de bus s’élève à 24V DC (+6/-
4V). Lorsque la tension est inférieure à 20 V, les dispositifs se déconnectent du bus. La vitesse de
transmission de données atteint 9.6 kbit/s, rendant ainsi les résistances d’arrêt inutiles.
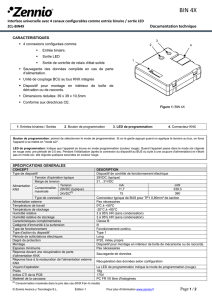
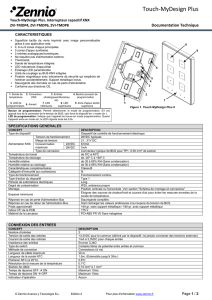
Topologie
KNX se répartit en différents segments d’une structure hiérarchique. La ligne est la plus petite unité.
Sur une ligne, il peut y avoir jusqu’à 64 composants de bus (D) et un dispositif de tension avec bobine de
self raccordée. À l’aide de coupleurs de ligne (LC) raccordés à la ligne principale, il est possible de
raccorder jusqu’à 15 lignes. Celles-ci forment une zone. Pour les installations plus importantes, les
coupleurs de zones peuvent être utilisés afin de raccorder 15 zones différentes entre elles par
l’intermédiaire d’un réseau fédérateur. Les lignes principales et les lignes de la colonne vertébrale
nécessitent un dispositif de tension avec bobine de self. Si toutes les lignes et toutes les zones sont
utilisées, plus de 12000 composants de bus peuvent ainsi être raccordés au réseau KNX.

Spécifications
Schneider Electric - Dieweg 3 - 1180 Bruxelles Page 4 / 101
customer-service.be@schneider-electric.com
www.schneider-electric.be Version 20110912_001_FR
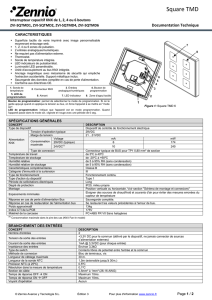
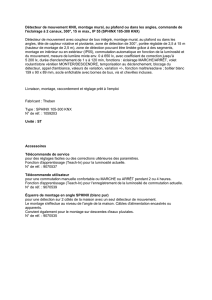
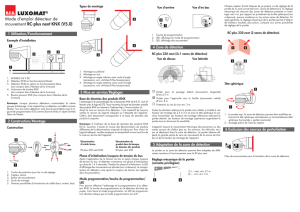
Structure de câblage de bus
Grâce au câble de bus, il est possible de réaliser aussi bien des structures en ligne, en étoile ou en
arborescence. Une multitude d’autres structures est également envisageable.

Spécifications
Schneider Electric - Dieweg 3 - 1180 Bruxelles Page 5 / 101
customer-service.be@schneider-electric.com
www.schneider-electric.be Version 20110912_001_FR
Lors de l’installation de câbles de bus, les valeurs
seuil suivantes doivent être prises en
considération :
a) La longueur maximale du câblage doit être de
350 m entre le dispositif de tension et le
composant du bus.
b) La longueur maximale du câblage doit être de
700 m entre deux composants du bus.
c) La longueur maximale du câblage sur un
segment en ligne ne peut pas dépasser 1000 m.
Les dispositifs KNX sont raccordés en parallèle à
la paire de fils rouge/noir du câble du bus à l’aide
d’une borne. Jusqu’à quatre paires de fils (rouge et
noir) peuvent être raccordé à chaque borne de
bus. La borne de bus peut en outre être utilisée
dans les boîtes d’encastrement comme borne de
raccordement des différentes sections de câbles
de bus.
Assurez-vous que la polarité soit respectée
lors de l’installation.
Lignes KNX
Les types de câbles suivants peuvent être utilisés comme câble du bus :
Type
Construction
Câblage
YCYM 2x2x0.8
Directives EIBA
(Basée sur : DIN VDE 0207 et 0815)
Fils : rouge (+KNX), noir (-KNX),
jaune (aucune fonction attribuée), blanc
(aucune fonction attribuée)
Câblage fixe : dans des espaces secs,
humides et humidifiés, pour la dépose,
l’encastrement et en gaines. À l’extérieur,
si protégé de la lumière solaire directe.
J-(St)Y2x2x0.8
Version KNX*
DIN VDE 0815
(Basée sur : DIN VDE
0815
Fils : rouge (+KNX) noir
(-KNX) jaune (aucune
fonction attribuée) blanc
(aucune fonction attribuée)
Câblage fixe : dans des espaces secs,
humides et industriels, pour la dépose,
l’encastrement et en gaines.
*Le DIN VDE 0829 standard définit la tension d’essai pour un essai complémentaire entre les fils et la
chemise extérieure, conformément au DIN VDE 0472 partie 508 en 4 kV. Cette valeur sera transformée en
2,5 kV à la suite des tentatives européennes d’aligner ces valeurs.
Si la deuxième paire de fils non attribuée du câble du bus est utilisée, les remarques suivantes doivent être
prises en considération :
a) Seule une basse tension du niveau ZL VS est autorisée
b) Courant continu maximal 2,5 A (une sécurité est nécessaire afin d’éviter les courts-circuits et les
surcharges)
c) Un transfert de voix est autorisé, sauf pour les lignes téléphoniques publiques
d) Évitez de la permuter avec la paire de fils attribuée à KNX.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
1
/
101
100%