III - Approximation de l`optique géométrique

Université du Maine - Faculté des Sciences ! Retour Sujet
III - Approximation de l’optique géométrique - rayon lumineux.
Un faisceau lumineux de large section peut être, à l’aide de diaphragmes, ramené à un pinceau étroit. On peut
mathématiquement idéaliser ce pinceau par une trajectoire orientée de la source vers le détecteur et appelée rayon lumineux.
Cette idéalisation, de nature géométrique, est à la base de l’optique géométrique, science dont le but essentiel est de déterminer
la « marche des rayons lumineux », c’est-à-dire le trajet suivi par la lumière lorsqu’elle traverse différents milieux.
3.1 Diffraction et optique géométrique.
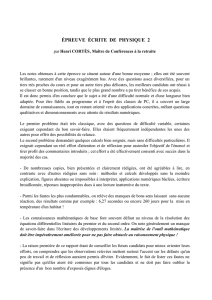
Lorsqu’on cherche à limiter un pinceau parallèle par un diaphragme de largeur d de plus en plus petite afin d’approcher l’idée
mathématique de rayon, on constate que la lumière à la sortie n’est plus parallèle, mais présente une dispersion angulaire ∆θ
donnée par la formule approchée :
d
λ
≅θ∆ (15)
d
x
∆θ
p∆px
Figure 3
Cette dispersion n’est observable que si d est petit (par exemple d < 100λ). Inversement un faisceau de section arbitrairement
petite n’est concevable que dans la limite λ = 0 (limite de l’optique géométrique).
En pratique, l’optique géométrique est valable lorsque les longueurs d’onde sont petites par rapport aux dimensions des
faisceaux.
3.2 Mécanique quantique et optique géométrique.
Introduire un diaphragme de largeur d sur le trajet d’un faisceau de particules revient à limiter l’extension de la coordonnée x
des photons à la valeur ∆x = d (figure 3). La théorie quantique précise qu’à toute dispersion ∆x de la coordonnée x est associée
une dispersion ∆px de la composante px de la quantité de mouvement donnée approximativement par la formule de
Heisenberg :
x
h
px∆
≅∆ (16)
La dispersion angulaire correspondante est :
p
1
d
h
p
px≅
∆
≅θ∆
On retrouve la formule (15) de la diffraction à condition de prendre pour longueur d’onde λ la longueur d’onde de de Broglie
donnée par (7).
Les phénomènes de diffraction ne limitent donc pas seulement la notion de rayon lumineux, mais aussi la notion classique de
trajectoire, quelle que soit la particule concernée.
L’approximation « géométrique » de l’optique ondulatoire est de même nature que l’approximation « classique » de la
mécanique quantique. Dans le cas des photons, la quantité de mouvement p est reliée à l’énergie par la formule p = E/c
(mécanique relativiste) ; la longueur d’onde de de Broglie λ = h/p = hc/E = hc/hν = c/ν n’est autre que la longueur d’onde de
l’onde lumineuse.
3.3 Forme des solutions de l’équation d’onde en milieu homogène.
s étant l’une quelconque des composantes de E (ou B) dans un repère orthonormé Oxyz, l’équation d’onde (3) relative à cette
composante s’écrit :
0
ts
v1
zs
ys
xs2
2
22
2
2
2
2
2=
∂
∂
−
∂
∂
+
∂
∂
+
∂
∂ (17)

Université du Maine - Faculté des Sciences ! Retour Sujet
avec s = s(x, y, z, t) de façon générale.
Prenons comme cas particulier s fonction de x et t seulement : s(x, t) ; alors on obtient une équation d’onde unidimensionnelle :
0
ts
v1
xs2
2
22
2=
∂
∂
−
∂
∂ (18)
qui est vérifiée pour toute fonction f(vt - x) et g(vt+x) ainsi que la somme :
() ( )
)xvt(gxvtft,xs ++−= (19)
expression dans laquelle f et g sont deux fonctions a priori arbitraires. La fonction (19) est la solution générale de l’équation
d’onde à une dimension.
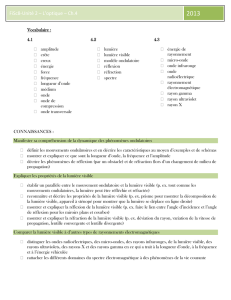
Si l’on change le couple (t, x) en (t+τ, x+vτ) où τ est un temps arbitraire, vt-x est changé en v(t+τ) - (x+vτ) = vt - x, donc reste
inchangé. La fonction f(vt-x) reste inchangé et représente donc une perturbation qui se propage dans la direction positive de x
avec la vitesse v. De même g(vt+x) représente une perturbation qui se propage dans la direction négative. Dans le cas d’une
seule onde progressive f on aurait ainsi :
x
x0
à t
0à t
0+τ
f
(vt
0-x0)f(v x
0)t
0 -
v
x0τ
+V
Figure 4.
3.3.1 Onde plane.
Considérons maintenant les solutions de l’équation d’onde (17) représentant les ondes planes, c’est-à-dire telles que la solution
s soit une fonction de t et de u.r avec u vecteur unitaire de la direction de propagation (figure 5).
y
z
..
O
H
M
r
u
x
h
Figure 5.
Posons r = OM et h = u.r avec h = ||OH||. Alors :
zyx zuyuxuh++=
la fonction d’onde dépendant de x (et y, z) par l’intermédiaire de h ; de sorte que dans l’équation (17) :
;
h
u
xx∂
∂
=
∂
∂;
h
u
yy∂
∂
=
∂
∂h
u
zz∂
∂
=
∂
∂
2
2
2
xxx
2
2
h
u
h
u
h
u
xx
x∂
∂
=
∂
∂
∂
∂
=
∂
∂
∂
∂
=
∂
∂
L’équation d’onde s’écrit alors :
()
0
ts
v1
hs
uuu 222
2
2
z
2
y
2
x=
∂
∂
−
∂
∂
++
u étant un vecteur unitaire, l’équation d’onde se réduit à :

Université du Maine - Faculté des Sciences ! Retour Sujet
0
ts
v1
hs2
2
22
2=
∂
∂
−
∂
∂ (20)
on est ainsi ramené au cas à une dimension (cf : éq.(18)). La solution générale est donc de la forme :
() ( )
u.ru.rr ++−= vtg)vt(ft,s (21)
f et g représentent des ondes planes car à un instant donné leurs valeurs restent constantes sur un plan u.r = constante, plan (P)
perpendiculaire au vecteur unitaire u selon la figure ci-dessous :
y
z
..
OA
B
C
H
M
r
u
x
(P)
Figure 6.
3.3.2 Onde sphérique.
Considérons maintenant les solutions de l’équation d’onde (17) représentant les ondes sphériques, c’est-à-dire telles que la
solution s soit une fonction de r et t.
x
y
O
M
r
z
Figure 7.
Dans le repère Oxyz : ||r|| = OM, r = OM, avec :
()
222 zyxr ++=
d’où :
() () ()
rr
x
x
r
rx ∂
∂
=
∂
∂
∂
∂
=
∂
∂
on obtient alors tous calculs faits (cf : exercice) :
2
2
r)rs(
r
1
s∂
∂
=∆
de sorte que l’équation d’onde s’écrit :

Université du Maine - Faculté des Sciences ! Retour Sujet
()
0
ts
v1
rrs
r
12
2
22
2=
∂
∂
−
∂
∂
ou, r étant indépendant de t :
() ()
0
trs
v1
rrs 2
2
22
2=
∂
∂
−
∂
∂ (22)
On est ramené à une équation différentielle ayant même forme que (18), dont la solution est évidemment du type :
()
)rvt(grvtfrs ++−=
ou encore :
() ()
()
rrvtg
rrvtf
t,rs +
+
−
= (23)
Une telles onde est dite sphérique car à un instant t donné l’ensemble des points M pour lesquels s garde une valeur constante
est une sphère centrée à l’origine O (figure 8).
x
y
O
M
r
z
r
Figure 8.
Les deux types de solutions, ondes planes et ondes sphériques, constituent les solutions les plus simples.
3.3.3 Onde plane progressive sinusoïdale.
Parmi toutes les solutions de type f(vt-u.r) on considère les solutions (à u donné) :
()
−ω= v
tcosst,s 0u.r
r
Quand r est fixé s reste inchangé si l’on change t en t+T, la période temporelle de l’onde est :
ω
π
=2
T
Quand t est fixé s reste inchangé si l’on change h = u.r en h+λ, la période spatiale de l’onde est :
vT
v2 =
ω
π
=λ (24)
λ est la longueur d’onde de l’onde sinusoïdale, onde dite harmonique ou monochromatique ; ω est la pulsation, qui ne dépend
que de la source. La longueur d’onde λ dépend du milieu par v. Dans le vide λ0 = cT, d’où : n
v
c
0==
λ
λ, d’après (13).
Soit encore :
n
0
λ
=λ (25)
avec n = n(ω).
L’onde se propage dans la direction de vecteur unitaire u. On appelle vecteur d’onde le vecteur :
uk λ
π
=2 (26)
alors :

Université du Maine - Faculté des Sciences ! Retour Sujet
()
k.r
−ω= tcosss 0 (27)
s0 désigne l’amplitude. En notation complexe :
()
k.r
−ω
=tj
0ess
on vérifie que la surface équiphase est, à t donné, le plan d’onde (P).
3.3.4 Vitesse de phase.
En posant Φ = ωt - k.r et en reprenant pour Φ(t, r) le raisonnement du §3.3 on vérifie que v représente la vitesse de phase de
l’onde. En remplaçant dans (26) λ par sa valeur tirée de (24), on obtient pour la norme k du vecteur d’onde :
v
kω
= (28)
3.3.5 Vitesse de groupe.
Dans un milieu dispersif : v = v(ω) et k(ω) = ω/v(ω), par définition on appelle vitesse de groupe :
dk
d
vgω
= (29)
On démontre la relation suivante dite de Rayleigh : λ
λ−= d
dv
vvg
et, en général, v croît avec λ.
1
/
5
100%