TOPEX-POSEIDON et la circulation des océans C

Terre et cosmos
TOPEX-POSEIDON
et la circulation des océans
TOPEX-POSEIDON (T-P) a été lancé en août 1992, et a fourni depuis la plus longue série
de mesures d’altimétrie de la topographie des océans. Ce satellite réalisé par le CNES
et la NASA a rempli avec succès sa mission principale, qui est la mesure du niveau de la mer
à haute précision, dont on peut déduire les courants océaniques. Il a permis d’aborder
les problèmes globaux qui ont besoin d’un prélèvement spatial et temporel dense, et d’une longue
période d’observation. Il a fourni des résultats sans précédent dans l’étude de la dynamique des
océans. Toutes les indications montrent que le satellite va continuer à fonctionner
à haute précision jusqu’en 2002. C’est donc un moment opportun pour dresser un bilan
des résultats apportés pendant ces cinq premières années.
C
onnaître, suivre et prévoir la
circulation des océans est un
problème fondamental lié à
la connaissance du climat, car les
courants transportent chaleur et espè-
ces chimiques dissoutes. Pour fixer
les idées, l’océan véhicule presque
autant de chaleur de l’équateur vers
les pôles que l’atmosphère. Il con-
tient 50 fois plus de carbone sous
forme dissoute qu’ilyadecarbone
dans le gaz carbonique de l’air ; en
pratique, c’est donc lui qui contrôle
le cycle du carbone, par l’intermé-
diaire de son transport vers l’océan
profond. Par ailleurs, les transports
de nutriments (nitrates, phosphates)
par les courants entretiennent une
biomasse 10 fois moins abondante,
mais 10 fois plus efficace pour fixer
le carbone dissous que la biomasse
continentale. Enfin, la circulation des
océans doit être connue pour faciliter
l’exploitation des mers ; en France,
les activités maritimes se chiffrent à
environ 5 % du PIB.
Les courants océaniques consti-
tuent un élément régulateur de la
variabilité climatique. L’étude du cli-
mat nécessite donc une connaissance
préalable de la circulation et de la va-
riabilité océaniques. Mais l’océan est
un milieu difficile d’accès car il est
opaque à la pénétration du rayonne-
ment électromagnétique, en particu-
lier de la lumière. Autrefois, la plu-
part des mesures étaient faites à partir
de bateaux ou de mouillages. L’ob-
servation in situ est si délicate qu’il
existe des régions où aucune mesure
n’a encore été faite, en particulier
dans l’océan austral et l’océan Paci-
fique sud, malgré un siècle d’océano-
graphie. Par ailleurs, l’océan est un
milieu turbulent, si bien que le suivi
de la circulation océanique passe par
une observation continue et globale,
que les moyens en mer ne permettent
pas. L’altimétrie par satellite permet
cette observation.
L’ALTIMÉTRIE PAR SATELLITE
ET LA CIRCULATION OCÉANIQUE
Si l’océan était homogène et au
repos, la surface de la mer serait une
équipotentielle du champ de gravité,
qu’on appelle un géoïde. Cependant,
l’océan n’est pas homogène, car ses
variables d’état, température et sali-
nité, qui déterminent sa densité va-
rient dans l’espace et dans le temps.
Ces variations sont principalement
provoquées par les variations de flux
de chaleur et de précipitation en sur-
face. Par ailleurs, il est soumis en
surface à l’action du vent et de la
pression atmosphérique. Enfin, il réa-
git à diverses forces de volume,
comme les forces de gravité qui pro-
voquent les marées. Ces forçages en-
tretiennent des variations de l’éléva-
tion de la surface libre de l’océan par
rapport au géoïde, que l’on appelle la
topographie dynamique. Ces varia-
tions se traduisent par des gradients
horizontaux de pression, auxquels
l’océan réagit par des courants qui
sont très proches de l’équilibre géos-
trophique : cet équilibre est atteint
lorsque les forces de Coriolis, qui dé-
pendent de la rotation de la terre, de
la latitude et de l’intensité du courant
équilibrent les gradients horizontaux
de pression. Par conséquent, si on
connaît la latitude, la hauteur et la
forme de l’empilement, on peut cal-
culer la trajectoire et la vitesse du
courant. Le principe de l’altimétrie
par satellite est donc très simple : il
s’agit de mesurer l’élévation de la
surface de l’océan pour en déduire
les courants géostrophiques.
– Laboratoire des études géophysiques et
océanographiques spatiales - GRGS, UMR
5566 CNRS-CNES-UPS, 18 av E. Belin,
31041 Toulouse Cedex 4.
– Institut National des Sciences de l’Uni-
vers - Département des Sciences de l’Uni-
vers du CNRS, 3 rue Michel-Ange, BP 287,
75766 Paris Cedex 16.
74

On pourrait penser que cette déter-
mination ne concerne que les cou-
rants de surface. Il n’en est rien. Il
est commode de décomposer les cou-
rants horizontaux selon certains mo-
des verticaux (dites « modes nor-
maux » ou « modes empiriques »).
Le premier mode, dit barotrope, cor-
respond à une vitesse horizontale
constante selon la verticale de l’or-
dre de quelques cm/s (figure 1) ; il
résulte de variations horizontales de
la pression réparties de façon cons-
tante dans toute la colonne d’eau. Ce
mode est donc surtout entretenu par
les forces de volume (les courants de
marées sont principalement baro-
tropes). Cependant, l’eau étant peu
compressible, les empilements d’eau
en surface, par exemple sous l’effet
du vent, tendent aussi à induire des
courants barotropes. Ceux-ci sont par
ailleurs très sensibles aux variations
de la profondeur de l’océan (qui est
de 3 800 m en moyenne).
Les autres modes verticaux sont
dits baroclines ; pour le premier
mode barocline, les courants horizon-
taux changent une fois de signe sur la
verticale, etc. Ces modes correspon-
dent à des variations horizontales de
la densité (qui résultent de variations
de la température et de la salinité)
aux différents niveaux de profondeur
dans l’océan (figure 1). Ces varia-
tions sont principalement rencontrées
dans les couches de surface (les
1 000 premiers mètres d’eau), qui
sont en contact avec l’atmosphère ;
en revanche, l’océan profond est
beaucoup plus homogène, et les gra-
dients horizontaux de densité y sont
faibles. Ces variations horizontales
de densité se traduisent par des varia-
tions de dilatation de la colonne
d’eau et donc par une topographie
dynamique en surface. Celle-ci induit
bien des gradients horizontaux de
pression, mais ils sont compensés
dans la colonne d’eau pour devenir
très faibles en profondeur.
En fait l’océan est assez simple :
presque partout, plus de 90 % des
courants horizontaux sont explicables
par les deux premiers modes, le
mode barotrope et le premier mode
barocline. Autrement dit, la topogra-
phie dynamique de surface est une
information presque directe sur les
courants horizontaux dans toute la
colonne d’eau. Plus encore, ces mo-
des verticaux sont en interaction dy-
namique entre eux à cause des pro-
cessus non linéaires, si bien que
Figure 1 - Principe de répartition des courants océaniques en modes barotropes et baroclines selon la
profondeur.
Terre et cosmos
75

lorsque l’on contraint un modèle
dynamique des courants à suivre la
topographie dynamique observée en
surface, on sait répartir cette informa-
tion selon la profondeur.
Les principaux courants océani-
ques de surface sont connus depuis
les années trente. Tous les atlas en
donnent la carte. Les grands tour-
billons ou « gyres anticycloniques
subtropicaux » réunissent les courants
intenses vers les pôles le long des
« frontières ouest » des bassins (Gulf
Stream, Kuroshio dans le Pacifique
nord...), leur dérive vers l’est aux la-
titudes moyennes (dérive nord-
Atlantique, courant des Açores) et les
courants de retour vers l’ouest (cou-
rant nord-équatorial). Plus près des
pôles, les courants sont organisés en
cellules cycloniques, c’est-à-dire que,
dans l’hémisphère nord, ils tournent
dans le sens inverse des aiguilles
d’une montre (courant du Labrador).
Dans les zones tropicales, les cou-
rants sont zonaux (courants sud- et
nord-équatoriaux, contre-courants
nord-équatoriaux).
En première approximation, la
géométrie de ces courants peut être
expliquée par une réponse de l’océan
à la friction du vent. De façon sché-
matique, les vents sont eux-mêmes
organisés en grandes cellules : par
exemple, on rencontre des alizés
d’est près de l’équateur et des vents
d’ouest dans les zones tempérées. La
friction du vent entraîne les eaux de
surface (dans une couche d’environ
100 m d’épaisseur), mais les forces
de Coriolis dévient la trajectoire de
ces eaux, vers la droite dans l’hémis-
phère nord. En conséquence, dans
l’hémisphère nord, poussées vers le
nord par les alizés et vers le sud par
les vents d’ouest, les eaux s’empilent
au centre des bassins. Aux plus hau-
tes latitudes, on retrouve un vent
d’est, si bien que l’eau de surface est
entraînée de façon divergente par
celui-ci (l’eau est entraînée vers le
nord) et par les vents d’ouest des
latitudes tempérées. La topographie
dynamique forme alors un creux.
Dans les zones tropicales où les
forces de Coriolis sont faibles ou
nulles, les vents alizés entraînent
l’eau vers l’ouest des bassins. Cela se
traduit par une pente de la surface de
l’océan le long de l’équateur, qui
présente quelques décimètres de
dénivellation. Une partie de cette eau
revient vers l’ouest avec des contre-
courants (ainsi qu’avec des sous-
courants équatoriaux, qui s’écoulent
sous les couches d’eau soumises à
l’influence du vent) ; ceux-ci coulent
à quelques degrés de latitude et sont
pratiquement en équilibre géostro-
phique ; leur trajectoire suit donc le
flanc de crêtes et de fossés allongés
le long de l’équateur.
PRINCIPE DE L’ALTIMÉTRIE PAR
SATELLITE
On peut bien sûr mesurer directe-
ment ou estimer indirectement les
courants océaniques à partir des don-
nées in situ. Cependant, par ces mé-
thodes on ne connaît pas encore
comment les courants varient aux
échelles de temps des saisons ou du
climat. En revanche, un satellite cou-
vre la totalité de la surface de la
Terre en quelques jours, et les don-
nées tombent régulièrement du ciel
pendant toute sa durée de vie. L’alti-
métrie par satellite permet donc de
mesurer en continu la topographie
dynamique de surface. La difficulté
vient de ce que l’amplitude des
signaux à mesurer va de quelques
centimètres (dans les zones de
faible énergie cinétique) au mètre
d’élévation (dans les courants forts
du bord ouest, par exemple).
L’altimètre mesure la distance en-
tre le satellite et la surface de la mer,
à partir de la durée du trajet aller-
retour du signal radar à fréquence
micro-onde (13,5 GHz). On cherche
à atteindre une précision de quelques
centimètres, alors que le satellite gra-
vite à environ 1 000 km d’altitude ! Il
faut donc une instrumentation très
précise, et corriger la mesure de tout
ce qui peut la perturber : électrons
dans l’ionosphère, vapeur d’eau dans
la troposphère, pression atmosphéri-
que, effet des vagues. Pour cela le
satellite embarque deux radars alti-
mètres, trois systèmes d’orbitogra-
phie et un radiomètre. Le total des
corrections atteint 2,5 m !... En fait,
le bruit de mesure des altimètres qui
avaient déjà fonctionné était de l’or-
drede3à4cm(celui du satellite
GEOSAT de la marine américaine,
qui a fourni des mesures de 1984 à
1989, ou celui de ERS-1, qui fonc-
tionne depuis 1991). Pour T-P, tout a
été optimisé pour diminuer ce niveau
de bruit, qui atteint de2à3cm;il
s’agit essentiellement d’un bruit
blanc.
Les trois systèmes d’orbitographie
permettent de savoir où est le satel-
lite. T-P embarque un système « la-
ser » : le satellite est visé par un ré-
seau mondial de lasers, dont les
signaux sont réfléchis par une cou-
ronne de miroirs située autour de
l’antenne du radar ; cela permet de
déterminer la distance entre le satel-
lite et les stations lasers à une préci-
sion centimétrique. Les autres systè-
mes sont des systèmes « Doppler » :
des signaux radio sont envoyés vers
T-P depuis d’autres satellites ou
depuis un réseau de balises au sol ; la
vitesse du satellite dans la direction
de visée est déterminée par effet
Doppler ; avec le système français
DORIS, une précision de 0,3 mm/s
est atteinte, alors que le satellite se
déplace à 7 km/s ! Ces informations
sont utilisées pour ajuster un calcul
dynamique de l’orbite, qui tient
compte des forces de gravité (Terre,
Lune et Soleil) mais aussi des effets
des marées ou de la pression atmos-
phérique, des forces de friction ou de
radiation (provenant du Soleil, reflet
de la Terre ou du satellite), des mou-
vements propres du satellite et même
des effets relativistes (qui jouent au
niveau de quelques millimètres de
distance radiale du satellite). Il faut
bien sûr savoir où sont les balises de
poursuite à une précision centimétri-
que, et pour cela tenir compte de
leurs déplacements par rapport au
centre de masse de la Terre (mouve-
ment du pôle, déplacements tectoni-
ques ou liés à l’effet de charge des
76

marées...). T-P a été placé assez haut
(1 336 km d’altitude) afin que son
orbite puisse être calculée très préci-
sément : d’une part, les balises de
poursuite le voient longtemps dans le
ciel ; d’autre part, l’orbite est peu
sensible aux anomalies du champ de
gravité de la Terre ou aux effets
résiduels de traînée atmosphérique.
Les calculs d’orbite sont maintenant
en accordà2à3cmprès avec les
données de poursuite du satellite. De
plus, l’erreur d’orbite a des caracté-
ristiques très particulières, et apparaît
surtout à des fréquences de
1/révolution et de 1/jour. On peut
donc la séparer du signal océanique
lors du traitement des données alti-
métriques.
Le niveau de la mer est alors dé-
terminé par différence entre la
mesure de distance du radar et la dé-
termination de hauteur du satellite.
LE SIGNAL ABSOLU DE TOPOGRAPHIE
DYNAMIQUE
A partir du géoïde de référence, la
différence entre le niveau de la mer
et celui-ci donne le signal absolu de
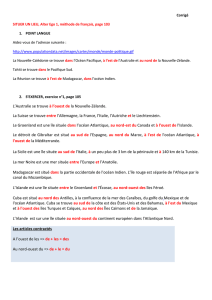
topographie dynamique. La figure 2
montre ce que l’on a estimé à partir
du premier cycle de données de T-P
(en 10 jours).
On reconnaît des bosses de 50 à
150 cm d’amplitude, calées près des
frontières ouest de chaque bassin
océanique, et autour desquelles tour-
nent les grands courants anticycloni-
ques subtropicaux comme le Gulf
Stream. On repère une dénivellation
de 1,5 m de hauteur, le long de la-
quelle coule le courant Antarctique
circumpolaire. On peut noter aussi
que le long de l’équateur, dans les
océans Pacifique et Atlantique, le ni-
veau de la mer est plus élevé à
l’ouest qu’à l’est des bassins. On re-
marque enfin la grande différence de
niveau entre les océans Pacifique et
Atlantique, qui résulte de la salinité
(et donc de la densité) plus élevée de
ce dernier.
Malheureusement, le géoïde reste
encore trop mal connu pour la plu-
part des besoins de l’océanographie :
sa précision est de l’ordre de 50 cm
pour les grandes longueurs d’onde
(plus de 2 000 km), et encore moins
bonne pour les plus courtes lon-
gueurs d’onde. Pour améliorer cette
situation, la seule méthode réaliste (et
techniquement tout à fait faisable)
consisterait à lancer un satellite gra-
vimétrique à basse altitude. Heureu-
sement, le géoïde ne varie pas à
l’échelle du temps océanique (1 jour -
10 ans). Si on prend la différence
entre les traces répétitives, on peut
donc observer avec une grande pré-
cision les variations du niveau de la
mer et donc des courants : c’est ce
qui est important pour les études du
climat et de son évolution.
LES MARÉES OCÉANIQUES
L’orbite a été choisie de façon à
séparer au mieux le signal des ma-
rées océaniques de celui des cou-
rants. Par effet stroboscopique entre
la période répétitive de l’orbite du sa-
tellite (9,916 jours pour T-P) et cel-
les des marées, les différentes ondes
de marées apparaissent comme autant
de signaux de basses fréquences. Par
exemple, l’onde lunaire semi-diurne
M2 apparaît à une fréquence de
62 jours. En fait, T-P constitue le
meilleur système d’observation des
marées disponible. Les modèles dy-
namiques actuels, ajustés à ces nou-
velles observations, atteignent une
précision de l’ordre de 2,5 cm (écart
type par rapport à un ensemble d’en-
viron 80 stations marégraphiques ré-
parties sur tout l’océan). C’est une
amélioration considérable, de l’ordre
d’un facteur 2 à 4, par rapport aux
modèles antérieurs.
GÉOGRAPHIE DES VARIATIONS
DU NIVEAU DE LA MER
Une fois soustraits les effets des
marées, la principale source de varia-
tion du niveau de la mer est la
réponse à la pression atmosphérique :
en gros, le niveau de la mer
s’enfonce de 1 cm quand la pression
s’élève de 1 millibar. Ce type de
réponse barotrope s’appelle l’effet
baromètre inverse. Il atteint fréquem-
ment 30 cm aux plus hautes latitudes.
En fait, on peut s’attendre à observer
des écarts à cette réponse parce qu’il
Figure 2 - Topographie dynamique absolue des océans déduite de 10 jours de données de Topex-
Poseidon.
Terre et cosmos
77

faut bien que la masse de l’eau soit
conservée (ce qui s’est enfoncé en un
point doit se retrouver ailleurs dans
l’océan). Ce transfert de masse est
réalisé par propagation d’ondes baro-
tropes, qui parcourent l’océan à des
vitesse de l’ordre de 40 m/s, si bien
que l’océan ne peut suivre les fluc-
tuations rapides de l’atmosphère (aux
échelles de l’ordre de 1 ou 2 jours).
En fait, les analyses statistiques
actuelles des données de T-P indi-
quent qu’on ne peut détecter d’écart
significatif à la réaction de baromè-
tre inverse, sauf à l’échelle de tout
l’océan (il y a des transferts saison-
niers et globaux de la masse d’air
entre les zones océaniques et conti-
nentales, de l’ordre de 2 mbar d’am-
plitude ; l’océan ne peut évidemment
pas réagir à une variation globale de
la pression atmosphérique ; les don-
nées de T-P permettent de vérifier
cette absence de réaction). En prati-
que, on corrige le niveau de la mer à
partir des champs de pression des
modèles météorologiques, en suppo-
sant que sa réponse est celle d’un ba-
romètre inverse.
Les courants, et donc le niveau de
la mer, varient pour bien d’autres rai-
sons encore. La figure 3 est une car-
tographie de l’écart type du niveau
de la mer sur une année. Ces varia-
tions peuvent être très faibles (moins
de 4 cm ; cela témoigne de la grande
précision des données), ou dépasser
30 cm dans les régions de courants
intenses comme le Gulf Stream ou le
courant Antarctique circumpolaire.
Cette carte avait déjà été obtenue à
partir des données du satellite alti-
métrique GEOSAT, car elle traduit
surtout les fluctuations mésoéchelles
(échelles spatiales de l’ordre de
200 km) des courants, qui sont faci-
les à extraire quelle que soit la préci-
sion des données. Les cartes établies
pour des années différentes sont
remarquablement cohérentes. L’im-
portance des fluctuations dans les
grands courants résulte des instabili-
tés non linéaires de ces derniers. En
fait, à partir de ces observations, on a
pu estimer le tenseur de Reynolds
(c’est-à-dire l’effet des fluctuations
sur le courant moyen), et montrer
qu’il contribuait à l’accélération des
grands courants et à l’amplification
de leur transport d’un facteur4à5.
VARIATIONS SAISONNIÈRES
DE LA HAUTEUR STÉRIQUE
Le signal de grande longueur
d’onde le plus important est lié au
stockage saisonnier de chaleur par
l’océan de surface. La figure 4 mon-
tre l’évolution temporelle du niveau
de la mer dans différentes bandes de
latitude, par rapport à la moyenne de
1993.
Dans l’hémisphère nord, le niveau
est le plus bas en mars, quand
l’océan est le plus froid et le plus
contracté, tandis qu’il est le plus
élevé en septembre, quand il est le
plus chaud et le plus dilaté.
L’amplitude du signal atteint ±5 cm.
Elle dépasse même ±15 cm dans les
régions du Gulf Stream et du Ku-
roshio. Dans l’hémisphère sud, ces
variations saisonnières sont nettement
plus faibles. En fait, on peut vérifier
que cette différence hémisphérique
est essentiellement explicable par la
plus grande proportion d’océan dans
l’hémisphère sud : en 1993, la quan-
tité de chaleur stockée saisonnière-
ment par l’océan a été approximati-
vement égale dans les deux
hémisphères, mais répartie sur une
plus grande surface dans l’hémi-
sphère sud.
Cette variation saisonnière est en
bon accord avec ce qui avait été cal-
culé à partir des données climatolo-
giques, dès 1973. On ne savait ce-
pendant pas si ce signal présentait
des variations interannuelles, qui tra-
duiraient des variations du stockage
saisonnier de chaleur par l’océan :
une différence de 1 cm (la précision
atteinte pour une zone de 10
6
km
2
de
surface) est approximativement équi-
valente à une anomalie de flux de
chaleur de 30 W/m
2
(ce qui est pro-
che de la précision des flux de cha-
leur des modèles météorologiques). Il
semble bien qu’il y ait des variations
importantes entre 1993 et 1994 !
EL NIÑO 1997
Le niveau de surface des océans
tropicaux répond principalement aux
fluctuations des vents alizés. Nor-
malement, dans l’océan Pacifique,
ces vents soufflent vers l’ouest, pous-
sant ainsi l’eau chaude de surface
vers l’Indonésie et l’Australie, une
action qui abaisse la thermocline et
Figure 3 - Carte de la variabilité du niveau de la mer en 1993.
78
 6
7
8
9
6
7
8
9
1
/
9
100%