N°3 Juin 2013 - INSERM - U1093 Cognition, Action, et Plasticité

Le jeudi 6 juin 2013 s’est tenue une soirée confé-
rence au sein de l’UFR STAPS de Dijon portant sur
le thème « Activité Physique Adaptée et Cancer ».
Cette soirée thématique a été entièrement élabo-
rée et mise en œuvre par 3 étudiantes du Master
2 APAS dans le cadre de leur formation. L’équipe
des formateurs de la filière APAS félicite Morgane
Ture, Séverine Floquet et Alison Catin pour leur
travail de qualité et leur investissement dans ce
projet. Environ 70 personnes se sont déplacées
pour mieux comprendre les bénéfices d’une activi-
té physique adaptée sur la santé et plus particuliè-
rement sur le cancer.
L’activité physique permet entre autre de prévenir
certains cancers. Les études scientifiques mon-
trent une diminution du risque de cancer pour les
individus plus actifs par rapport aux moins actifs
(17% pour le cancer du colon, 20% pour le cancer
du sein, 27% pour le cancer de l’endomètre).
D’autre part, pendant et après la phase de traite-
ment, une activité physique adaptée d’intensité
faible à modérée améliore la qualité de vie, a des
bénéfices sur l’anxiété, la dépression, le sommeil,
l’image du corps et le bien être. La pratique dimi-
nue également la sensation de fatigue des
patients sans effet secondaire.
Mais l’activité physique adaptée a aussi son
rôle en prévention secondaire. Une étude
américaine récente montre, après le diagnos-
tic, une diminution de 24% du taux de récidive
et de 34% du risque de décès par cancer du
sein. Une activité physique d’intensité modé-
rée de 6 à 9 heures par semaine donne lieu à
une plus grande survie de la population. C’est
ce que ce sont attachés à montrer les diffé-
rents intervenants :
Pr Pierre Fumoleau, directeur du Centre
Georges François Leclerc, a présenté les
chiffres actuels du cancer.
Aude-Marie Foucaut, doctorante à l’Université
Lyon 1, a présenté un programme d’acti-
vité physique adaptée chez des patients
en cours de traitement.
Dr Geneviève Jolimoy, oncologue médicale, a
fait le lien entre alimentation, activité
physique et cancer.
Fabienne Mougin-Guillaume, maître de confé-
rences à l’Université de Franche Comté, a
présenté le Diplôme Universitaire Activi-
tés Physiques Adaptées Nutrition et Can-
cer proposé à Besançon.
Valérie Rodière, formatrice au sein de la Fédé-
ration Française d’Education Physique et
de Gymnastique Volontaire, a présenté
son programme Gym’ Après Cancer.
L’association Carpe Diem 21 a permis aux pa-
tientes de témoigner de leur expérience.
Les organisatrices remercient toutes les per-
sonnes ayant participé à la réussite de cette
soirée.
Master 2 : une soirée « APA et Cancer »
D A N S C E
N U M É R O :
Prévention de la
chute
2
Une patiente désaf-
férentée à Dijon
2
Calendrier 2
Rôle de la gravité 3
J U I N 2 0 1 3
A N N E E 1 , N ° 3
Faculté des Sciences du Sport Dijon – Le Creusot
La Lettre de la filière APAS
Ont contribué à ce numéro :
Alison Catin, Lionel Crognier,
Séverine Floquet, Florent
Fouque, France Mourey, Chara-
lambos Papaxanthis, Morgane
Ture et Olivier White

P A G E 2
Présence d’une patiente désafférentée à Dijon
Activité physique et prévention de la chute
Depuis janvier 2013 un groupe d’experts travaille, à
l’initiative de l’INSERM, à une vaste revue de la litté-
rature qui sera suivie de l’élaboration de recomman-
dations sur le thème de l’activité physique et de la
chute chez le sujet âgé. S’il existe une littérature
abondante sur la chute et plusieurs textes de recom-
mandations émanant de l’HAS ou de l’INPES jamais
un travail spécifique de cette importance n’a été
entrepris en ce qui concerne l’activité physique. On
peut penser que les bénéfices bien connus de l’acti-
vité physique sur les grandes fonctions devraient
être retrouvés sur la prévention de la chute mais les
niveaux de preuve méritent d’être explorés avec
précision afin de mieux orienter les programmes.
Ce rapport qui ne sera publié qu’en septembre ne
peut être dévoilé maintenant mais il semblait impor-
tant d’une part d’annoncer sa sortie et d’autre part
de prendre dès à présent la mesure des perspectives
pour les professionnels de l’activité physique adap-
tée. Indépendamment des recommandations qui
concerneront les évaluations et les contenus des
programmes eux- mêmes, le rapport insistera sur la
nécessité de favoriser les réseaux intégrant le
monde médical et le monde associatif et sportif.
En effet, actuellement trop peu de liens existent
encore entre les généralistes, les gériatres, les
hôpitaux de jour d’évaluation et les profession-
nelles de l’activité physique sur la question de la
chute. Il sera recommandé notamment :
L’élaboration, l'animation et l'évaluation
de programmes d'activités physiques
collectifs ou individuels en lien avec les
professionnels de santé ou médico-
sociaux.
L'organisation, en lien avec les profes-
sionnels de santé concernés, de forma-
tions spécifiques destinées au perfec-
tionnement des professionnels de l'acti-
vité physique et sportive.
L'organisation de séances d'information
destinée à optimiser la prescription d'ac-
tivité physique par les professionnels de
la santé.
France Mourey
Rentrée des Licences 3 APAS : lundi 2 septembre 9h30 ([email protected])
Rentrée des Masters 1 APAS : lundi 9 septembre à 9h30 ([email protected])
Rentrée des Masters 2 APAS : lundi 16 septembre ([email protected])
Cette particularité intéresse les chercheurs.
Ginette fait donc le tour du monde des labo-
ratoires. Elle était récemment à Dijon
(laboratoire INSERM 1093), où elle s'est prê-
tée à de nombreuses expériences dont l'ob-
jectif était de mieux cerner le rôle de la pro-
prioception dans la production des mouve-
ments du corps humain. Les chercheurs du
laboratoire ont testé sa capacité à s’adapter
aux perturbations visuelles et motrices, ainsi
que son habilité à définir son espace péri-
personel et à imaginer/prédire ses actions.
A 65 ans, Ginette tient à rester le plus auto-
nome possible malgré son handicap et se
livre avec passion aux différentes expérimen-
tations pour aider à l’avancée de la re-
cherche. Charalambos Papaxanthis
Originaire du Canada, Ginette est l’une des 4
personnes au monde que l'on dit désafféren-
tée. Elle a, en effet, perdu toute sensibilité au
niveau des membres, à la suite d’une infection
virale survenue il y a 30 ans. La sensibilité est la
base d’un sens encore méconnu qu'on appelle
la proprioception, le sixième sens. Elle est utili-
sée à chaque instant pour guider nos mouve-
ments et se situer dans l'espace. Pour Ginette,
privée de proprioception, chaque mouvement
du corps est une épreuve. Elle n'a pas cons-
cience de son corps et doit compenser l’ab-
sence de proprioception par la vue. Elle doit
ainsi voir chaque geste qu'elle effectue afin de
le contrôler. Ginette préfère donc se déplacer
en fauteuil roulant car pour marcher, il faudrait
qu'elle ne quitte pas ses pieds des yeux.
Calendrier Universitaire 2013-2014

fort entre le pouce et l’index pour le faire
décoller de la table.
Lorsque cette première phase d’approche
est terminée, il faut maintenant le dépla-
cer, sans qu’il glisse de notre prise. Tout le
challenge va consister à anticiper les fluc-
tuations de forces qui vont s’exercer entre
nos doigts. En effet, si on déplace une
masse vigoureusement, on lui soumet une
accélération importante (a) qui, multipliée
à la masse (m) résultera en une force iner-
tielle F=ma. Remarquablement, notre sys-
tème nerveux ajuste la force de préhen-
sion exercée par le pouce et l’index sur
l’objet de manière à anticiper ces fluctua-
tions à 10ms près.
Outre la masse et l’accélération, l’objet a
également un poids qui est constant sur
terre et dépend de la gravité (g). Des
études ont montré que la gravité est re-
présentée de manière spécifique au sein
de notre organisme. Il est cependant diffi-
cile d’en faire un paramètre expérimental
bien contrôlé.
Les centrifugeuses offrent une opportuni-
Des expériences en neurosciences com-
portementales permettent d'étudier le
rôle de la gravité lors de l'exécution de
tâches motrices simples comme la ma-
nipulation d'un objet. Nous ne nous
rendons pas compte de la complexité
des mécanismes implémentés par notre
système nerveux central pour déplacer
un simple objet. Avant tout mouve-
ment, une première prise d’information
visuelle est nécessaire : nous observons
la situation et estimons la masse de
l’objet, si sa surface est glissante, sa
forme etc. Tous ces paramètres phy-
siques vont influencer la manière avec
laquelle nous allons le manipuler. Lors-
que nos doigts entrent en contact avec
la surface de l’objet, les mécanorécep-
teurs situés dans la pulpe des doigts – il
y en a environ 17000 qui codent des
bandes de fréquences temporelles et
spatiales différentes – vont nous confir-
mer les informations visuelles. Si elles
ne s’avéraient pas correctes, par
exemple, si l’objet est plus glissant qu’il
n’y paraissait, il va falloir le serrer plus
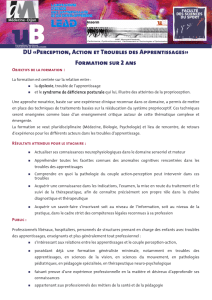
té unique pour contrôler le para-
mètre gravitaire avec une très haute
résolution. Une sphère reproduisant
un cockpit d'avion de chasse est mise
en rotation au bout d'un axe de 9.1
m de rayon. L'inclinaison de cette
sphère - et donc de la personne qui y
est assise - va être adaptée en temps
réel en fonction de la vitesse de rota-
tion du système de manière à ce que
la résultante des composantes cen-
tripète et gravitaire (toujours à 1g
sur Terre) soit alignée avec l'axe du
corps. Il en résultera une sensation
(réelle) d'hypergravité. Récemment,
une série de sujets ont manipulé des
objets en subissant des plateaux
d'hypergravité entre 1g et 3g. Ce
système permet de contrôler les vec-
teurs "gravitaires" dans les trois di-
mensions en temps réel jusqu'à des
valeurs de 15g avec des change-
ments pouvant aller jusqu'à 10g/s.
(Dynamic Flight Simulator, QinetiQ,
Flight Physiological Center, Sweden).
Olivier White
Faculté des Sciences du Sport
de Dijon
BP 27877
21078 Dijon Cedex
La recherche des membres de l’U1093 s’articule autour du concept de la plasticité
pour la compréhension des processus cortico-spinaux impliqués dans l’action et
pour la rééducation de la fonction motrice. L’impact de l’activité physique sur la
plasticité cérébrale, les circuits neuronaux impliqués dans l’exécution et la simula-
tion mentale du mouvement, les lois qui régissent le contrôle du mouvement, et
l’influence du vieillissement normal et pathologique sur les processus sensorimo-
teurs constituent les axes de recherche fondamentaux du laboratoire. Les résul-
tats obtenus conduisent au développement de méthodes innovantes pour évaluer
et rééduquer la fonction motrice. L’objectif est donc d’améliorer notre connais-
sance de la fonction motrice et de ses déficiences pour mieux évaluer les consé-
quences des rééducations sur l’indépendance fonctionnelle et la qualité de vie.
Centrifuger des humains pour comprendre le rôle de la gravité dans nos mouvements
http://u1093.u-bourgogne.fr/
1
/
3
100%