corps remorque

ACCUEIL
Corps remorqué dans l’eau
Frédéric Elie, août 2007
La reproduction des articles, images ou graphiques de ce site, pour usage collectif, y compris dans le cadre des études scolaires et
supérieures, est INTERDITE. Seuls sont autorisés les extraits, pour exemple ou illustration, à la seule condition de mentionner
clairement l’auteur et la référence de l’article.
Dans bien des domaines techniques, civiles comme militaires (océanographie, activités
sous-marines, pêche, sauvetage en mer, activités contre la pollution, etc.) on est amené
à réaliser le remorquage d’un corps sous-marin par un bateau. Modéliser et prédire les
comportements d’un tel corps, de nature et de forme très diverses, sont très complexes
et nécessitent des codes de calculs élaborés de mécanique des fluide.
Dans cet article on s’intéresse à la modélisation très simplifiée du comportement d’un
corps remorqué dans l’eau par un bateau. En particulier, on étudie la relation qui peut
exister entre la vitesse du remorqueur et l’immersion du corps remorqué. De prime
abord, l’intuition permet de s’attendre à ce que l’immersion diminue lorsque la vitesse
augmente : en effet l’augmentation de la vitesse entraîne une augmentation de la force
de tension au niveau du câble de remorquage (supposé rigide) et donc une situation où
le poids du corps est de moins en moins compensé par la poussée d’Archimède,
puisque à celle-ci vient s’ajouter ce surcroît de tension, par suite le corps remonte. C’est
ce que confirme le calcul, comme on le verra : la courbe immersion-vitesse est
régulièrement décroissante (ou croissante si on prend les valeurs négatives pour
l’immersion). Ce résultat général est toutefois contredit dans certains cas comme l’ont
montré des expériences et des observations en situations réelles : pour certaines plages
de vitesse, on observe un plateau, ou un comportement localement inverse, pour
l’immersion. Il n’est pas évident, dans l’approche simplifiée proposée ici, d’expliquer
cette « anomalie » : quelques tentatives d’ « affinement » ne suffisent pas. Par contre,
elle pourrait s’expliquer par le fait que le câble de traction n’est pas infiniment rigide : en
effet, prenant en compte une certaine élasticité du câble, toujours dans le modèle
simplifié, chose qui conduit à une situation calculatoire assez inextricable, je crois
arriver à certaines conditions pour lesquelles la courbe cesse d’être monotone et
présente un point d’inflexion. Mais mon approche peut être sujet à caution, vos
remarques sont les bienvenues.
Modèle simplifié : câble de traction infiniment rigide
©Frédéric Élie, août 2007 - http://fred.elie.free.fr - page 1/11

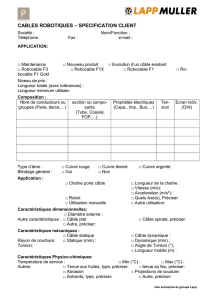
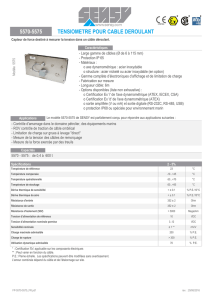
Voir figure ci-après :
Hypothèses :
- le remorquage se fait au centre d’inertie G du corps remorqué, le point d’attache du
câble sur le bateau est P et est fixe
- le câble de traction est infiniment rigide : par conséquent la vitesse du bateau
remorqueur, V, est égale à celle du centre d’inertie du corps G (dans le texte, les
grandeurs vectorielles sont notées en gras), et la longueur du câble L est constante
- le câble est supposé complètement tendu : GP est un segment de droite
- la masse et le volume du câble sont négligés
- les mouvements propres du corps remorqué autour de G sont négligés
- la forme du corps remorqué, et la nature de sa coque, n’interviennent pas autrement
que via le coefficient de la force de traînée ; son volume V n’intervient que pour la
poussée d’Archimède qui s’exerce sur lui
- la force de traînée suivant la verticale Oy est négligée : seule intervient la force de
traînée suivant l’horizontale Ox
La longueur du câble étant constante, on a :
GP = L
GH = X = L cos α
y = - L sin α
Bilan des forces s’exerçant sur le corps remorqué en G :
- gravité :

- poussée d’Archimède :
, ρ masse volumique de l’eau
- tension du câble :
- force de traînée (résistance de la part de l’eau à l’avancement du corps) :
, où l’on néglige la résistance suivant Oy ; S est le maître-couple du
corps remorqué
Écrivons les équations de la dynamique en G :
que l’on projette sur les axes Ox et Oy :
(1)
(2)
Ces équations vont nous permettre d’établir la loi d’évolution de l’immersion (-y) en fonction de
la vitesse d’avancement dans l’eau Vx.
Le câble étant infiniment rigide, les inconnues (-y) et α sont reliées par :
que l’on remplace dans (2) :
(3)
©Frédéric Élie, août 2007 - http://fred.elie.free.fr - page 3/11

En supposant que le remorquage s’effectue à vitesse constante (dVx/dt = 0), l’équation (1)
donne une relation sur la tension de traction T:
à (3 bis)
Or : cos² α = 1 – sin² α = 1 – (y / L)², que l’on remplace dans (3), compte tenu de la relation sur
T :
Recherchant la solution pour des immersions constantes, une fois fixée la vitesse, l’équation
précédente donne la relation entre l’immersion et la vitesse :
à
Examinant la relation précédente, on voit que l’évolution de l’immersion avec la vitesse
nécessite un déséquilibre entre le poids du corps et la poussée d’Archimède :
m > ρV puisque y < 0 en immersion : le corps doit être suffisamment pesant pour ne pas
remonter à la surface.
Cherchant plutôt à exprimer y = f (Vx), on inverse la relation précédente, ce qui donne :
(4)
On voit que : si Vx = 0 (bateau immobile), alors y = - L (puisque B < 0) : le corps G « pend »
dans l’eau à la verticale du point P).
Si Vx = ∞ (vitesse du bateau « infinie », en tous cas très grande), alors y = 0 : le corps est tracté
à la surface de l’eau (comme dans le ski nautique).
Par ailleurs, l’étude du sens de variation de la relation (4) va nous renseigner sur le rôle du
paramètre B :
< 0 si B > 0, ce qui n’a pas de sens physique ici
> 0 si B < 0 (m > ρV) qui est la condition requise, on l’a vue
L’immersion (en valeur absolue) décroît donc quand la vitesse de traction augmente, et cette

décroissance est d’autant plus marquée que B est grand (en valeur absolue) et/ou que la
longueur L du câble est grande. Or B est grand lorsque la masse du corps est élevée (m
grande) et/ou qu’il est effilé (S faible), et/ou que son coefficient de traînée est faible (le corps
avance plus facilement dans l’eau).
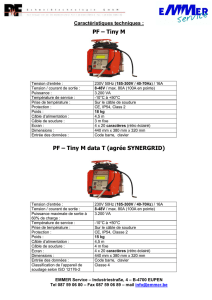
La tangente est horizontale (dy /dVx = 0) en Vx = 0.
L’allure de la courbe donnée par (4) est donnée ci-après. J’y ai également superposé celle de l’
« anomalie » dont je parlais en introduction :
modèle simplifié : prise en compte de la composante verticale de la
résistance de l’eau
Loi immersion-vitesse :
On admet maintenant que la résistance de l’eau s’effectue aussi suivant la verticale Oy, bien
que la composante verticale de la vitesse, Vy, soit très faible dans la configuration de traction
adoptée. Alors :
, où K’ et S’ sont le coefficient hydrodynamique et le maître-couple suivant Oy
L’équation (2) devient donc :
©Frédéric Élie, août 2007 - http://fred.elie.free.fr - page 5/11
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%