Identification Système: Méthodes IV et Erreur de Prédiction
Telechargé par
Dihia Serghane

USTHB
2.3 Méthode des variables instrumentales
La méthode des variables instrumentales est très utilisé pour l’identification en boucle fermée
avant que soient développée les méthodes d’erreur de prédiction. Elle permet d’annuler
asymptotiquement le biais sur les vecteurs des paramètres.
Méthode des variables instrumentales tends à obtenir E(Φ(t)E0(t)) = 0, par la modifica-
tion de la vecteur d’observation Φde l’algorithme des moindres carrés.
Puisque le biais de l’estimateur des moindres carrés est biaisé à cause de la corrélation
entre Φet e0, on se propose de déterminer une autre matrice qui permette le calcul de tout
en évitant cette corrélation et donc le biais de l’estimateur.
Posons:
ˆ
θ= (ZTΦ)−1ZTY
où Z est la matrice instrumentale.
ˆ
θtends vers θsous les conditions suivants:
1) z(t)et e0(t)sont non corrélés.
2) ZTΦest inversible.
Choix de la variable Z:
Le choix de la variable instrumentale Z(t)est qu’elle doit être suffisamment corrélée à
Φ(t)et non corrélé avec le bruit du système e0(t).
Concèderons le modèle suivant:
y(t) = −a1y(t−1) −... −any(t−n) + b1u(t−1) + ...bmu(t−m) + e0(t)(2.30)
=>
Y= ΦT(t)θ+E0(t)(2.31)
Avec Φ(t)=[−y(t−1), ...., −y(t−n), u(t−1), ....u(t−m)]Tet θ= [a1, ...., an, b1, ...bm]T
Une choix de Z est:
Z(t) = [−yM(t−1), ..., −yM(t−n), u(t−1), ....u(t−m)]T
où yM(t)est une approximation de yp(t)(la sortie non bruitée) générée à partir d’un
modèle auxiliaire dont l’entrée est u(t). Comme il faut disposer d’un modèle auxiliaire suff-
isamment représentatif, on initialise souvent cette approche avec la solution obtenue à partir
des moindres carrés linéaires. L’avantage de ce choix est qu’il n’a pas besoin d’informations
et d’hypothèses sur le bruit.
L’algorithme récursive devient:
Pk+1 =Pk−PkZk+1ϕT
k+1Pk
1 + ϕ(k+ 1)TPkZk+1
(2.32)
ˆ
θk+1 =ˆ
θk+Pk+1Z(k+ 1)[y(k+ 1) −ϕ(k+ 1)Tˆ
θk](2.33)
USTHB

USTHB
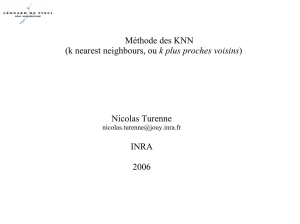
Exemple: Soit le modèle suivant:
y(t) + ay(t−1) = bu(t) + cv(t−1) + v(t)(2.34)
v(t)est un bruit blanc de variance égale à 1.
Les paramètres de système sont données comme suit:
a=−0.9, b = 1, c = 0.3
L’entrée u(t) est donné par:
u(t)=0.1sin(πt
50 +π
3)+0.2sin(πt
30 )
Φ(t)=[−y(t−1)u(t)] Z(t) = [−ˆy(t−1)u(t)]
USTHB

Chapter 3
Méthode de l’erreur de prédiction
Le problème d’identification paramétrique peut être étudié dans un cadre plus général avec
la méthode de l’erreur de prédiction. Cette méthode est basée sur les trois étapes suivantes:
1. Choisir la structure du modèle du système. Le choix de la structure dépend des
hypothèses sur l’ordre du modèle du processus et la nature du bruit. Deux hypothèses dif-
férentes pour le bruit sont considérées:
(a) Le bruit n’est pas corrélé avec l’entrée du processus. Cette hypothèse conduit aux
structures sans modèle du bruit.
(b) Le bruit sur la sortie est un bruit blanc filtré par un filtre d’ordre fini. Cette hypothèse
conduit aux structures avec modèle du bruit.
2. Définir le prédicteur de la sortie en relation avec la structure du modèle. Le prédicteur
est une fonction des paramètres du modèle à identifier ( inconnu) et des signaux d’entrée et
sortie, ˆy(k) = F(θ, y(k−1), ..., u(k−1), ...). En règle générale, le prédicteur est défini tel que
l’erreur de prédiction pour le meilleur prédicteur F(θ0, y(k−1), ..., u(k−1), ...)(où θ0est
le vecteur de paramètres du vrai modèle) ne soit pas corrélée avec l’entrée pour l’hypothèse
(a) ou soit blanche pour l’hypothèse (b).
3. Minimiser l’erreur de prédiction avec une méthode numérique. Après avoir défini le
prédicteur pour la structure choisie, on obtient l’erreur de prédiction ε(k) = y(k)−ˆy(k)
qui est une fonction du vecteur des paramètres à identifier θ. On obtient ainsi un problème
d’optimisation numérique dont le critère à minimiser est la norme 2 de l’erreur de prédiction:
θ=argminJ(θ) = 1
N
N
X
k=1
2(k)
Ce critère peut être minimisé à l’aide de l’algorithme itératif de Gauss-Newton qui nous
donne un minimum local du critère.
14

USTHB
3.1 Structures sans modèle du bruit
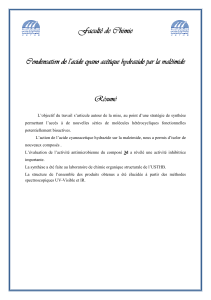
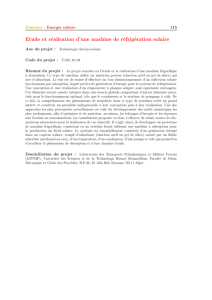
3.1.1 Structure OE (Output Error)
Supposons que la sortie mesurée du système puisse être exprimée comme suit:
y(k) = G0(q−1)u(k) + n(k)(3.1)
Fig 3.1: Structure OE.
où n(k)est un bruit stationnaire à moyenne nulle indépendant de l’entrée et G0(q−1)est
le vrai modèle du système avec une fonction de transfert d’ordre fini représentée par:
G0(q−1) = q−d0B0(q−1)
A0(q−1)(3.2)
B0(q−1) = b00 +b10q−1+... +bm0q−m0(3.3)
A0(q−1) = 1 + a10q−1+... +an0q−n0(3.4)
θT
0= [a10, ..., an0, b00, ..., bm0](3.5)
Cette structure est connue sous le nom de la structure de l’erreur de sortie (output error,
OE).
Considérons l’équation (3.1) et supposons qu’on soit à l’instant k−1et qu’on veuille
prédire la sortie du système à l’instant k (prédicteur à un pas). La sortie mesurée peut
s’écrire y(k) = yp(k) + n(k). Il est évident que la sortie du modèle du processus yp(k)peut
être facilement calculée avec les informations disponibles à l’instant k−1à condition que les
paramètres du vrai modèle G0(q−1)soient parfaitement connus. Par contre, étant un signal
aléatoire, le bruit n(k)n’est pas prévisible avant sa réalisation à l’instant k. Donc le meilleur
prédicteur pour la structure de l’erreur de sortie est:
ˆy(k, θ0) = G0(q−1)u(k)(3.6)
où, ˆy(k, θ0)est la sortie prédite à l’instant k qui dépend du vecteur de paramètres du vrai
modèle θ0. Comme θ0est en principe inconnu, on peut construire un prédicteur paramétrisé
USTHB

USTHB
où le vecteur θ0est remplacé par un vecteur de paramètres inconnu θcomme suit:
ˆy(k, θ) = G(q−1)u(k) = q−dB(q−1)
A(q−1)u(k)(3.7)
où G(q−1, θ)est l’ensemble des modèles candidats pour le vrai modèle avec:
B(q−1) = b0+b1q−1+... +bmq−m(3.8)
A(q−1) = 1 + a1q−1+... +a0
nq−n(3.9)
θT= [a1, ..., an, b0, ..., bm](3.10)
Si d0=d, m0=met n0=n, on dit que G0(q−1)appartient à l’ensemble des modèles
G(q−1), c’est-à-dire G(q−1, θ0)=G(q−1).
L’erreur de prédiction s’écrit:
(k, θ) = y(k)−ˆy(k, θ) = G0(q−1)u(k) + n(k)−G(q−1)u(k)=[G0(q−1)−G(q−1)]u(k) + n(k)
(3.11)
A partir de cette équation, on observe que si G0(q−1)appartient à l’ensemble des modèles
et θ=θ0, c’est-à-dire G(q−1) = G0(q−1), l’erreur de prédiction sera égale au bruit (k, θ0) =
n(k). Alors, pour ˆ
θ=θ0, l’erreur de prédiction ne sera pas corrélée avec l’entrée du processus
(car n(k) n’est pas corrélée avec u). Cette propriété intéressante peut être utilisée pour la
validation du modèle identifié. Cette structure est la meilleure structure pour identifier
un modèle si le but d’identification est de trouver un modèle de simulation et on n’a pas
besoin d’un modèle du bruit. Cependant, les paramètres du modèle interviennent de façon
non linéaire dans l’équation de l’erreur de prédiction et par conséquent cela conduit à un
problème de régression non linéaire pour lequel un optimum global ne peut pas être garanti
facilement.
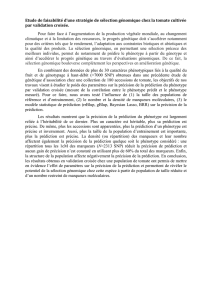
Exemple 4: Les mesures suivantes ont été effectuées sur un processus dynamique ini-
tialement au repos dont la sortie y(k)est perturbée par un bruit de mesure n(k):
k 0 1 2 3 4 5 6 7 8 9 10
u(k) 0 1 -1 1 1 1 -1 -1 0 0 0
y(k) 0 1.1 -0.2 0.1 0.9 1 0.1 -1.1 -0.8 -0.1 0
a) Calculer b0et b1du modèle:
y(k) = b0u(k) + b1u(k−1)
à l’aide de la méthode des moindres carrés.
USTHB
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%