Synchronisation sur Front: Cours d'Électronique Numérique
Telechargé par
Charles Yerima

THEME :
Synchronisation sur front et exemples de
Chronogramme
Plan
I. Introduction
A. Définitions de base de la synchronisation
B. Importance de la synchronisation dans les systèmes électroniques
C. Présentation des bascules synchrones et asynchrones
II. Bascules asynchrones (Cas de la Bascule RS)
III. Bascules synchrones (Cas de la synchronisation sur niveau)
IV. Synchronisation sur Front
A. Explication des fronts (front montant et front descendant)
B. Utilisation de la synchronisation sur front dans les bascules
V. Comparaison des Bascules Synchrones et Asynchrones
A. Avantages et inconvénients de chaque type de bascule
B. Choix en fonction de l'application
C. Exemples de chronogrammes comparatifs.
VI. Applications Pratiques
A. Utilisation des bascules dans les circuits électroniques
B. Exemples d'applications de synchronisation sur front
VII. Conclusion

I. Introduction
L'introduction à la synchronisation sur front s'avère cruciale dans la compréhension
des systèmes numériques. La synchronisation sur front, également appelée
synchronisation par front montant ou descendant, est un concept essentiel dans la
conception des circuits électroniques. Elle fait référence à la coordination précise des
signaux émis ou reçus au niveau des transitions entre les états logiques hauts et bas
d'une onde. Cette synchronisation minutieuse revêt une importance capitale dans la
prévention des erreurs de traitement des données et dans l'optimisation des
performances des circuits, constituant ainsi un élément fondamental de la fiabilité et
de la précision des systèmes numériques.
II. Bascules asynchrones (Cas de la Bascule RS)
La bascule RS est la bascule asynchrone la plus simple. Elle comporte Une entrée R
(Reset ) de mise à zéro Une entrée S (Set) de mise à un Une sortie Q et son inverse
̅
La table de vérité de cette bascule est la suivante :
Quand R=S=0, la sortie Qt+1 (sortie au temps t+1) ne change pas elle est égale à Qt
(sortie à l'instant t), la bascule fonctionne en mémoire.
Quand S=1 et R=0 la sortie est mise à 1 (Set).
Quand R=1 et S=0 la sortie est mise à zéro.
La combinaison des entrées S=R=1 est une combinaison interdite car les sorties Q
et Q ont la même valeur logique. Cette porte peut être constituée de deux portes
NOR.

On définit également la bascule R S qui a la table de vérité suivante :
Le symbole de cette porte est :
Cette porte peut être constituée de portes NAND.
On remarque que les sorties sont bouclées sur les entrées.
III. Bascules synchrones (Cas de la synchronisation sur niveau)
Bascule RST
La bascule R S est construite à partir de portes NAND. On introduit alors un signal
de synchronisation d’horloge noté T. Le changement d’état est autorisé quand le signal
d’horloge T vaut 1. Les portes NAND bloquent le signal quand T= 0.
Quand T=1, la bascule fonctionne comme une RS
Quand T=0, la bascule garde l’état précédent : la bascule fonctionne en mémoire.

Bascule D Latch
Cette porte se représente sous forme de circuit intégré avec deux entrées D (donnée) H
(horloge) et sa sortie Q sous forme directe et complémentéeQ.
La bascule recopie l’entrée D en sortie Q quand l’horloge est active c’est à dire sur niveau
haut en logique positive (sur le niveau bas en logique négative). Quand l’horloge est inactive,
la bascule garde l’état précédent. Qt+1= Qt.
IV. Synchronisation sur front
A. Explication des fronts
Front montant
Un front montant est le moment où un signal passe de l’état bas (0) à l’état haut
(1). C’est un terme couramment utilisé en électronique et en informatique, en
particulier dans la logique séquentielle. Par exemple, dans un signal logique, le front
montant est le passage de l’état bas du signal à l’état haut. Ces fronts sont utilisés
pour déclencher des événements ou des changements d’état dans les systèmes
numériques.
Front descendant
Un front descendant est le moment où un signal passe de l’état haut (1) à l’état bas
(0). C’est un terme couramment utilisé en électronique et en informatique, en
particulier dans la logique séquentielle. Par exemple, dans un signal logique, le front
descendant est le passage de l’état haut du signal à l’état bas. Ces fronts sont
utilisés pour déclencher des événements ou des changements d’état dans les
systèmes numériques.
B. Utilisation de la synchronisation sur front dans les bascules
La synchronisation sur front dans les bascules est utilisée pour minimiser la durée de
l’état sensible d’une bascule. En d’autres termes, on s’arrange pour que la bascule
reste dans son état mémoire sauf pendant un bref instant, juste au moment où

l’entrée d’horloge passe de 0 à 1 (ou de 1 à 0). C’est à ce moment-là que la bascule
change d’état.
Dans le cas des bascules synchrones, les changements d’état ont lieu pour un
niveau donné (0 ou 1) de l’horloge, sur un front montant ou descendant de l’horloge,
ou après deux fronts successifs de l’horloge (front montant puis descendant ou vice
versa).
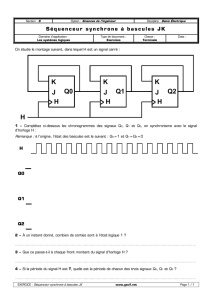
Par exemple, dans une bascule JK Maître-Esclave, on utilise 2 bascules JK en
cascade, la seconde recevant comme signal d’horloge le signal d’horloge de la
première, complémenté. De plus, le bouclage des sorties de la seconde bascule
s’effectue sur les portes d’entrée de la première. Ainsi, le retour d’information ne
s’effectue qu’après un niveau haut suivi par un niveau bas sur l’horloge. Cela revient
à obtenir un déclenchement sur impulsion.
V. Comparaison des bascules Synchrones et Asynchrones
A. Choix en fonction de l'application
Le choix de la bascule à utiliser dépend de l’application spécifique et des exigences
du système. Voici quelques exemples d’applications pour différents types de
bascules :
1. Bascule RS : Elle est très courante et utilisée pour stocker un bit
d’information binaire. Elle peut être utilisée comme un simple élément de
stockage pour mémoriser l’état d’un signal, ou comme un élément de
synchronisation pour synchroniser différents signaux dans un système
électronique.
2. Bascule D : Elle est la plus couramment utilisée dans les circuits numériques.
Elle possède une seule entrée, D, et deux sorties, Q et Q’. Lorsque l’entrée D
est haute, la sortie Q est mise à l’état haut, et lorsque D est basse, la sortie Q
est remise à l’état bas. La bascule D est utilisée pour les applications de
stockage et de transfert de données.
3. Bascules JK :
La bascule JK est un choix populaire pour plusieurs raisons :
Fonctions logiques complexes : La bascule JK permet la mise en œuvre de
fonctions logiques plus complexes.
Éléments de mémoire : Elle permet la création d’éléments de mémoire dans les
systèmes numériques.
Applications diverses : Elle est largement utilisée dans les compteurs, les
registres à décalage, les diviseurs de fréquence et autres applications où une
logique séquentielle est requise.
Suppression de l’indétermination : L’intérêt de la bascule JK est qu’elle
supprime l’indétermination de la bascule RS lorsque R et S sont tous les deux à
Quatre états possibles : Avec la bascule JK, 4 états sont possibles, ce qui la
rend plus flexible pour certaines applications.
Il est important de noter que les bascules peuvent être classées en deux types en
fonction de leur mécanisme d’horloge : synchrone et asynchrone. Les bascules
synchrones utilisent un signal d’horloge pour synchroniser leur fonctionnement. Le
signal d’horloge est utilisé pour activer ou désactiver les entrées et les sorties de la
bascule. Les bascules asynchrones, en revanche, n’utilisent pas de signal
 6
7
8
6
7
8
1
/
8
100%