Université Cadi Ayyad Faculté polydisciplinaire Département de physique Safi
Mécanique du point matériel Prof. El Ouardi El Mokhtar 1
Année Universitaire: 2018 /2019
Filières SMPC/ SMIA
El Mokhtar El Ouardi TD de mécanique du point matériel
Correction de la série N°3 : dynamique du point (Facultatif)
Exercice N°1
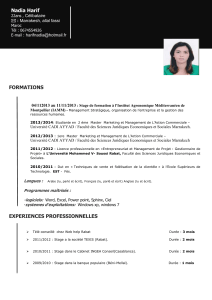
Dans un plan Oxy un cercle de diamètre OA tourne à la
vitesse angulaire constante autour du point O. On
initialement en A parcourt la circonférence dans le sens
contraire au sens trigonométrique avec la vitesse
angulaire .
1- Exprimer les composantes des vecteurs vitesse et
accélération de M dans le repère Oxy.
2- Exprimer les composantes des vecteurs vitesse et accélération de M par rapport au
3-
1- dans le repère Oxy:
Posant R le rayon du cercle
On a dans Oxy :
et
La vitesse de M: on dérive x et y par rapport au temps.
: on dérive le vecteur vitesse par rapport au temps.
2- :

Université Cadi Ayyad Faculté polydisciplinaire Département de physique Safi
Mécanique du point matériel Prof. El Ouardi El Mokhtar 2
3-
La vitesse d'entraînement
:
La rotation étant uniforme
L'accélération d'entraînement est :
Exercice N°2
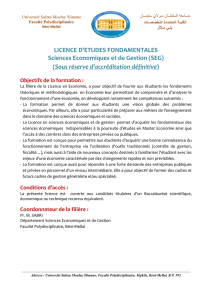
Soient (,) un référentiel absolu muni de la base (
) et
) le
O1 (). On donne
où est une constante positive et t le temps.
En plus, 1 ) avec une
vitesse angulaire constante 1 telle que
(). Dans le plan horizontal
, une tige
() 1) avec une vitesse
angulaire constante 2, tel que
) où
est le vecteur unitaire porté par la tige (T).
Un point est assujetti à se déplacer sur la Tige (). Il
est repéré dans le référentiel 1 par :
où
(
) est une base mobile dans 1.
N.B : Toutes les expressions vectorielles doivent être
exprimées dans la base (
).

Université Cadi Ayyad Faculté polydisciplinaire Département de physique Safi
Mécanique du point matériel Prof. El Ouardi El Mokhtar 3
I-Etude de la cinématique de M par décomposition de mouvement :
1) Déterminer
la vitesse relative de .
2) Déterminer
.
3) En déduire
la vitesse absolue de .
4) Déterminer .
5) Déterminer .
6) Déterminer .
7) En déduire .
II-Etude de la cinématique de M par calcul direct :
8) Retrouver
par calcul direct.
9) Retrouver par calcul direct.
I-Etude de la cinématique de M par décomposition de mouvement :
1- la vitesse relative de :
2- :
3- La vitesse absolue de :
4- :
5- ainement de :
6- :
7- :
II-Etude de la cinématique de M par calcul direct :
8-
par calcul direct :
9-
par calcul direct :

Université Cadi Ayyad Faculté polydisciplinaire Département de physique Safi
Mécanique du point matériel Prof. El Ouardi El Mokhtar 4
Exercice N°3
N°3

Université Cadi Ayyad Faculté polydisciplinaire Département de physique Safi
Mécanique du point matériel Prof. El Ouardi El Mokhtar 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%