Chap1: Généralités sur les unités d’usinage et les machines-outils:
1
Chap1: Généralités sur les unités
d’usinage et les machines-outils:
Introduction :
Une unité d'usinage est un ensemble intégré de machines-outils et
d'équipements connexes, organisés de manière à accomplir un processus d'usinage
spécifique. Ces machines-outils travaillent de manière coordonnée pour effectuer des
opérations de transformation sur une pièce brute, afin de lui donner la forme, les
dimensions et les propriétés requises. L'objectif d'une unité d'usinage est d'optimiser
l'efficacité, la précision et la productivité du processus de fabrication. Elle est utilisée
dans diverses industries, telles que l'automobile, l'aérospatiale, l'ingénierie mécanique,
et bien d'autres, pour produire des composants et des pièces finies de haute qualité.
Les machines-outils :
I-1 Définition d’une machine-outil
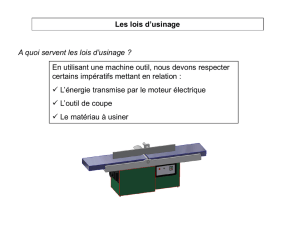
Une machine-outil est un équipement mécanique destiné à exécuter un usinage
avec une précision et une puissance adaptées. C'est un moyen de production destiné à
maintenir un outil fixe ou mobile(en translation ou en rotation), et une pièce à usiner
(fixe ou en mouvement de translation ou de rotation). L'usinage, éventuellement par
enlèvement de matière, est issu des mouvements relatifs pièce-outil.
I-2 Composition d’une machine-outil:
La composition, plus simple, d’une machine-outil comprend :
1. Un moteur (M), en général électrique (comme source d’énergie) ;
2. Mécanismes intermédiaires (MI) ou la transmission : C’est l’ensemble des
organes qui permettent la transmission de l’énergie (ou le mouvement) du moteur
vers les organes de réception :

Chap1: Généralités sur les unités d’usinage et les machines-outils:
2
3. l’organe de travail (OT) ou machine réceptrice qui peut être la broche de la
machine-outil ;
4. Un système de commande pour coordonner les paramètres entre moteur et
organe de travail en fonction des conditions d’exploitation de cette machine ;
5. Un socle ou un bâti sur lequel sont montés tous ces organes.
Dans les prochaines parties, et en relation avec notre cas d'étude, nous allons nous
concentrer sur les aspects liés à la motorisation et aux mécanismes intermédiaires.
I-2-1 Motorisation :
Pour convertir l’énergie électrique, la méthode la plus efficace est d’utiliser des
moteurs
électrique qui reposent sur les principes d’interaction électromagnétique de « Laplace »
entre le
Stator (élément fixe) et le Rotor (élément tournant).
La plus couramment utilisée est la machine asynchrone :

Chap1: Généralités sur les unités d’usinage et les machines-outils:
3
Avantages:
il peut fonctionner à haute vitesse avec un couple constant quelle que soit la
vitesse ; il est simple et robuste avec une durée de vie très longue au minimum
d’entretien
(absence de balai), contribue à la protection de l’environnement (sans émission de
CO2).
I-2-2 Transmission :
La transmission reliant le moteur à l’outil se compose généralement d’une série
d’éléments et d’organes en mouvement constituant la chaîne cinématique.
Du point de vue strictement mécanique, on peut dire qu’une machine-outil se
compose d’une série d’éléments qui :
Transmettent du mouvement ;
Transmettent des efforts ;
Transmettent de l’énergie.
On peut décomposer une machine-outil en deux grands groupes d’organes :
La chaine cinématique dont les éléments en mouvement sont le siège d’efforts qui
transmettent de l’énergie. On dit qu’un élément est menant lorsqu’il communique
Moteur électrique
Moteur électrique asynchrone triphasé

Chap1: Généralités sur les unités d’usinage et les machines-outils:
4
un mouvement et de l’énergie motrice à un autre élément. Celui qui reçoit ce
mouvement et cette énergie est dit mené.
Le bâti et les guidages qui soutiennent et guident les organes de la chaine
cinématique ne transmettent que des efforts, pas d’énergie.
I-2-2-a la boite a vitesse :
La boite de vitesse est un dispositif très nécessaire dans la machine-outil, c’est
élément qui transmet et modifier le couple et la vitesse de rotation entrante d’une
source d’alimentation en rotation à l’aide d’une chaine d’engrenages de différentes
tailles. Les changements de la boite de vitesse peuvent être effectués manuellement ou
automatiquement.
Fonctionnement de la boite de vitesse d’une machine-outil :
La boite de vitesse contient des déférents baladeurs et pignons, et leur combinaison
fournit différents rapports de transmission permettant la rotation de la broche à
différent vitesses.
Le choix des vitesses est guidé par l’intermédiaire d’un tableau des vitesses qui se
trouve sur
la poupée fixe, ce tableau comprend toutes les positions disponibles des bras de levier
avoir
toutes vitesses convenables.
Choix de la boite de vitesse :
Vue que les engrenages ont pour but de transmettre le mouvement d'un arbre
Boite de vitesse d’une machine-outil
Tableau d'indicateur des vitesses

Chap1: Généralités sur les unités d’usinage et les machines-outils:
5
moteur à un
autre récepteur alors que ces deux arbres peuvent occuper des positions différentes les
quelles
influent considérablement sur le choix du type d'engrenage.
En général dans les boites de vitesses les axes de l'arbre moteur et récepteur sont
parallèles et
l’engrenage le plus commode choisi est un engrenage cylindrique à denture droite
ou
hélicoïdale d'où nous avons le choix entre les deux.
I-2-2-b 8 Chariot et Glissières:
Le chariot est l’organe sur le quel est monté l’outil, la pièce ou le montage porte-
pièce ou porte-outil et qui permet le déplacement dans une seule direction.
Le rôle des glissières est d’éliminer au chariot cinq degrés de liberté de façon à
permettre entre le support de glissières et le chariot un déplacement unidirectionnel qui
est en général linéaire.
La glissière, charge localement le bâti. Leur liaison doit être conçue de façon que le bâti
travaille comme une poutre – ou un caisson – et donc, de façon prévisible, calculable.
La liaison idéale chariot/glissière doit être sans jeu ni frottements, ou plus
exactement, elle ne devrait avoir qu’un frottement de type hydrodynamique de façon à
permettre une erreur de positionnement nulle à l’arrêt, et afin de communiquer un
amortissement aussi fort que possible à la liaison chariot/bâti.
I-3 Les axes des machines :
La norme NF Z 68-020 définit un système de coordonnées machine et les
mouvements de la machine de telle façon qu'un programmeur puisse décrire les
opérations d'usinage sans avoir à distinguer si l'outil s'approche de la pièce ou la pièce
de l'outil.
Le système normal de coordonnées est un système cartésien rectangulaire de sens
direct avec les trois principaux axes appelés X, Y et Z et avec des axes de rotation
autour de chacun de ces axes appelés respectivement A, B et C.
I-3-1 Mouvements de translation X, Y, Z:
Axe Z de mouvement:
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%