2022-2023
Systéme
Automatisée
+
régulation
industrielle
polytechnique sousse [email protected]
Réalisée par:
Houssem Eddine
Essaies
élève ingénieur 4éme année
électrique automatique
Projet semestriel:

À PROPOS
DE L'UNIVERSITÉ:
Fondée en 2009, L’Ecole Polytechnique de Sousse est une grande école privée
d’enseignement et de recherche à vocation internationale, accréditée EUR- ACE
et qui a pour unique vocation de former des ingénieurs ayant un niveau
technique et scientifique conforme aux meilleurs standards internationaux. Elle
se fixe résolument comme mission de garantir une excellente insertion
professionnelle à ses jeunes diplômés en les propulsant directement à
l’employabilité
Une accréditation EUR-ACE qui accorde à nos futurs ingénieurs un niveau de
diplôme conforme aux standards internationaux via l’excellence de nos
formations continues et de nos programmes et qui leur permettront de
recevoir, et de manière systématique, la totale reconnaissance de leurs
diplômes partout en Europe.
L'Ecole Polytechnique de Sousse:
1

2
Le portail Totally Integrated Automation, ci-après appelé portail TIA,
vous offre la fonctionnalité complète pour réaliser votre tâche
d'automatisation, regroupée dans une plateforme logicielle globale.
Le portail TIA permet pour la première fois de disposer, au sein d'un
cadre, d'un environnement de travailcommun pour une ingénierie
transparente avec différents systèmes SIMATIC. Le portail TIA vous
permet donc également pour la première fois de travailler de manière
sécurisée et confortable dans le système global.
Tous les progiciels requis, de la configuration matérielle à la
visualisation du processus en passant par la programmation, sont
intégrés dans un cadre complet d'ingénierie.
INTRODUCTION AU TIA
Les avantages de travailler avec le portailTIA :
En travaillant avec le portail TIA, vous bénéficiez d'un soutien
efficace lors de la réalisation de votre solution d'automatisation
grâce aux fonctions suivantes :

● Ingénierie transparente basée sur un concept unitaire de
commande L'automatisation de processus et la visualisation de
processus vont "de paire".
● Gestion centralecohérente des données à l'aide d'éditeurs
performants et d'une symbolique transparente
Une fois créées, les données sont disponibles dans tous les
éditeurs. Les modifications et les corrections sont reprises et mises
à jour automatiquement dans l'ensemble du projet
● Concept global de bibliothèque
Utilisez les instructions prédéfinies et réutilisez des parties de
projets déjà existantes.
● Plusieurs langages de programmation
Cinq langagesde programmation différents sont à votre disposition
pour effectuer votre tâche de programmation.
3
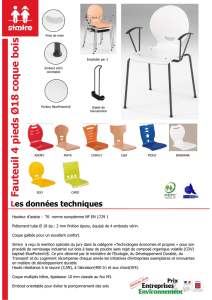
Il s’agit d’une machine capable de remplir et de boucher des
flacons. Les flacons sont présentés sous le poste de remplissage
puis sous le poste de bouchage
PRÉSENTATION DE L’INSTALLATION

4
Figure 1 : Machine à remplir et à boucher
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%