École Nationale des Sciences Appliquées
1
er
année cycle ingénieur
Année 2014 – 2015
Pr. N. EL BARBRI
Département génie électrique
Plan du cours : Électronique Analogique:
• Chapitre I : Circuits à amplificateurs;
• Chapitre II : Amplificateur opérationnel / Filtres analogiques;
• Chapitre III : Contre réaction;
• Chapitre IV : Oscillateurs sinusoïdaux;
• Chapitre V : Oscillateurs non sinusoïdaux;
• Chapitre VI : Convertisseurs analogique/numérique et numérique/analogique.

Chapitre I: Circuits à Amplificateurs
I. Rappels
1. Régime de petits signaux
Définitions: lorsque les variations d’une grandeur par rapport à sa valeur de repos, ont de très faibles
amplitudes, on dit que le système travail en régime de petits signaux.
Dans ces conditions, les déplacements effectués par les points de fonctionnement peuvent être
assimilés à des segments de droites.
2. Quadripôles équivalents
On s’attache à modéliser les composants actifs par des schémas équivalents électriques décrivent
correctement le fonctionnement du dispositif dans certaines domaines de fréquences.
Deux modèles les plus utilisés:
• les matrices hybrides (H): s’emploie aux basses fréquences.
• les matrices admittances (Y): s’emploie aux hautes fréquences.
L’équation de définition des paramètres hybrides (h
ij
):
Quadripôle
v1v2
i1i2
+= +=
⇔
=
2221212
2121111
2
1
2
1
)( vhihi
vhihv
v
i
hij
i
v
Ce qui conduit au schéma équivalent:
h11 1/h22
h21i1
h12v2
v2
v1

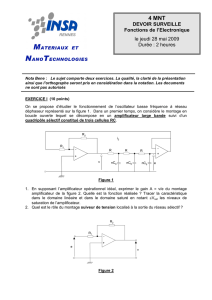
2.1 Applications aux transistors bipolaires:
a) Exemple d’un montage émetteur commun
b) Schéma équivalent simplifié du transistor:
Avec r = β/s où s est la pente du transistor.
2.2 Schéma équivalent d’un étage:
L’emploi des schémas équivalent permettra de calculer facilement les grandeurs suivantes:
• Amplification en tension : A
v
= v
2
/v
1
• Amplification en courant : A
i
= i
2
/i
1
• Impédance d’entrée : Z
e
= v
1
/i
1
• Impédance de sortie : Z
s
= v
2
/i
2
.
Bib
CB ib ic
Vbe r Vce
E
T
h11B
E
1/h22
h21ib
h12Vce
C
Vce
ic ic
Vbe
Vce
ib
Vbe

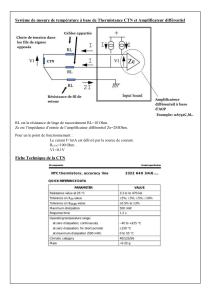
Exemples d’amplificateurs à transistor bipolaire:
a) Émetteur commun
• Impédance d’entrée : Z
e
= R
1
//R
2
//(r
π
+ R
E
(β+ 1)
• Amplification en tension : A
v
= v
2
/v
1
= - βR
c
/(r
π
+ (β+ 1)R
E
).
• Impédance de sortie : | Z
s
| = Rc
ibB
Bib
C
Rg
Rc
eg RE
V2
Rc
E
(B+1)ib
icig
R1//R2
R1
RE
+Vcc
R2
r
v1v2
v1
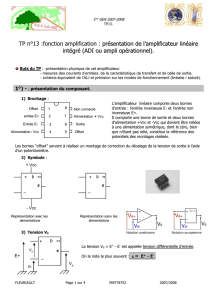
b) Collecteur commun
• Impédance d’entrée : Z
e
= R
1
//R
2
//(r
π
+ R
E
(β+ 1)
• Amplification en tension : A
v
= v
2
/v
1
= - R
E
(β+1)/(r
π
+ (β+ 1)R
E
) ≈1
• Impédance de sortie :
)////(
1
1
// 21 RRRr
B
RZ gEs +
+
=
π
v1v2
v1
v2
r
R1
Rg RE
B
+Vcc
Bib
eg
ig ib
E
R2 RE
Cic
R1//R2

c) Base commune
Rg
ig
RE
+Vcc ib
R1 Rc
eg
Bib
B
Rg
E
C
eg
R2
ic
RE
r
V2
Rc
v1v1
v2
• Impédance d’entrée : Z
e
= R
E
//r
π
/(β+ 1)
• Amplification en tension : A
v
= v
2
/v
1
= βR
c
/r
π
• Impédance de sortie : | Zs | = Rc
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
1
/
144
100%