Les hacheurs
G BERTHOME – Lycée Mireille GRENET – COMPIEGNE Page 1/4
I Définition d’un hacheur :
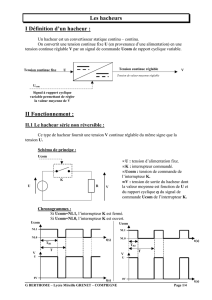
Un hacheur est un convertisseur statique continu – continu.
On convertit une tension continue fixe U (en provenance d’une alimentation) en une
tension continue réglable V par un signal de commande Ucom de rapport cyclique variable.
II Fonctionnement :
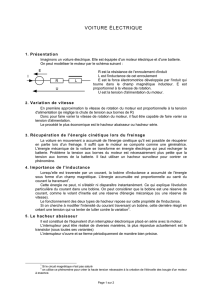
II.1 Le hacheur série non réversible :
Ce type de hacheur fournit une tension V continue réglable du même signe que la
tension U.
Schéma de principe :
Chronogrammes :
Si Ucom=NL1, l’interrupteur K est fermé.
Si Ucom=NL0, l’interrupteur K est ouvert.
Tension continue fixe
électrique
Tension continue réglable
mécanique
U
V
Tension de valeur moyenne réglable
U
com
Signal à rapport cyclique
variable permettant de régler
la valeur moyenne de V
R
K
U
Ucom
V
•
U : tension d’alimentation fixe.
• K : interrupteur commandé.
• Ucom : tension de commande de
l’interrupteur K.
•
••
• V : tension de sortie du hacheur dont
la valeur moyenne est fonction de U et
du rapport cyclique α
αα
α du signal de
commande Ucom de l’interrupteur K.
t(s)
Ucom
NL0
NL1
T
T
H1
t(s)
V
0V
U
t(s)
Ucom
NL0
NL1
T
T
H2
t(s)
V
0V
U

Les hacheurs
G BERTHOME – Lycée Mireille GRENET – COMPIEGNE Page 2/4
La valeur moyenne de V est : <V>=α
αα
α×
××
×U ; avec
T
T
H
=
==
=α
αα
α
Si le rapport cyclique
α
αα
α
augmente (on augmente
T
H
et on fixe la période
T
)
alors on
augmente la valeur moyenne de
V.
Si le rapport cyclique
α
αα
α
diminue (on diminue
T
H
et on fixe la période
T
)
alors on
diminue la valeur moyenne de
V.
II.2 Le hacheur réversible en tension (le pont en H) :
Ce type de hacheur fournit une tension continue réglable
V
qui peut-être de signe
opposé à
U.
Schéma de principe :
Cas d’une valeur moyenne de V positive :
Pour obtenir une valeur moyenne de
V
positive
il faut :
-
K
2
et
K
3
ouverts,
-
K
4
fermé.
-
K
1
alternativement ouvert puis fermé de manière à faire évoluer la valeur
moyenne de
V.
<V>=α
αα
α×
××
×U ;
avec
α
αα
α
rapport cyclique du signal de commande de l’interrupteur
K
1
.
•
U :
tension d’alimentation fixe.
•
K
1
à K
4
:
interrupteurs commandés.
•
••
• V :
tension de sortie du hacheur dont
la valeur moyenne est fonction de
U
et
du rapport cyclique
α
αα
α
du signal de
commande des interrupteurs
K
1
ou
K
2
.
R
K
1
U
V
K
2
K
3
K
4
t(s)
V
0V
U
t(s)
V
0V
U
K
1
fermé
K
1
ouvert
K
1
fermé
K
1
ouvert

Les hacheurs
G BERTHOME – Lycée Mireille GRENET – COMPIEGNE Page 3/4
Cas d’une valeur moyenne de V négative :
Pour obtenir une valeur moyenne de
V négative
il faut :
-
K
1
et
K
4
ouverts,
-
K
3
fermé.
-
K
2
alternativement ouvert puis fermé de manière à faire évoluer la valeur
moyenne de
V.
<V>=-α
αα
α×
××
×U ;
avec
α
αα
α
rapport cyclique du signal de commande de l’interrupteur
K
2
.
III Applications –critères de choix :
Ces hacheurs sont utilisés pour faire varier la vitesse de rotation des moteurs à courant
continu.
Les interrupteurs sont réalisés par des
transistors bipolaires, transistors MOS,
thyristor, triac,…
Le modèle équivalent d’un moteur étant une
résistance Rm,
une
inductance Lm
et
une
force électromotrice E
il faudra rajouter des éléments de protections (diodes de roue
libre).
III.1 Variation de la vitesse d’un moteur à courant continu :
t(s)
-U
0V
t(s)
V
-U
0V
K
2
fermé
K
2
ouvert
K
2
fermé
K
2
ouvert
V
U
Vm
R
m
L
m
E
D
Q
1
Schéma équivalent du moteur
à courant continu
•
••
•
La diode
D
est une diode de
roue libre qui protège le transistor
Q
1
au blocage de la surtension
produite par l’inductance interne
du moteur.
•
Le transistor
Q
1
doit avoir un
courant
I
CMAX
>Im
MAX.
•
••
•
Le transistor
Q
1
doit pouvoir
supporter une tension
V
CEMAX
>
U.
•
Pour obtenir un courant
Im
constant on peut rajouter en série
une inductance de lissage.

Les hacheurs
G BERTHOME – Lycée Mireille GRENET – COMPIEGNE Page 4/4
III.2 Changement de sens et variation de vitesse d’un moteur à courant
continu :
Les diodes
D
1
à
D
4
permettent de protéger les transistors ou de réaliser des phases de
roues libres lors de la commande par rapport cyclique variable.
L’inductance en série
Ll
au moteur permet de lisser le courant circulant dans le
moteur.
Les critères de choix des transistors doivent tenir compte :
-du courant
I
CMAX
qui doit être supérieur au courant max qui circule dans le
moteur.
-de la tension
V
CEMAX
que peut supporter le transistor qui doit être supérieure à
2×
××
×U
.
Remarque :
il existe des circuits intégrés dont le pont en H est intégré, on vient
simplement commander le sens de rotation du moteur et la vitesse grâce à des entrées
logiques. Pour choisir ce type de circuit intégré on prendra en compte le courant maximal et la
tension maximale qu’il peut commander. Il faudra également vérifier sir les diodes de
protection sont internes ou non.
Critère de choix de la période de hachage :
Ila faut que
T
HAC
<<τ
ττ
τ=
L
L
R
L
L
L
: inductance interne du moteur
R
L
: inductance interne du moteur
R
m
L
m
E
L
l
U
Q
1
Q
2
Q
3
Q
4
D
1
D
2
D
3
D
4
Vm
1
/
4
100%