Définitions de base
Vitesse de base
C'est la vitesse nominale du moteur
obtenue pour la charge nominale,
la tension d'induit nominale,
l'excitation nominale,
à la température de service normale.
Les valeurs nominales sont notées sur la plaque
signalétique

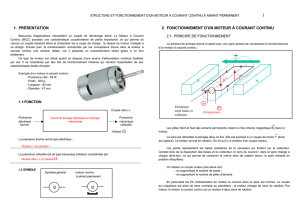
STATOR
La carcasse, les pôles principaux et les pôles
de commutation sont entièrement feuilletés.
Les composants du stator sont soudés ensemble dans un bâti de fixation qui aligne et
presse les tôles ensemble en une unité monobloc.
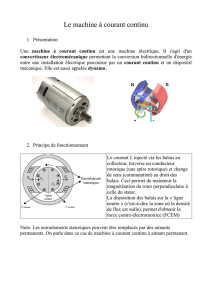
Conception d'ensemble

Conception d'ensemble
INDUIT (Rotor)
Le noyau d'induit est constitué de disques en tôles électromagnétiques isolées.
L'enroulement d'induit est en cuivre isolé verni. Les bobinages de cuivre sont placés
dans l'isolant des encoches.

 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%