Réseaux industriels : Bus de terrain - Master Instrumentation
Telechargé par
Mario Tn

Réseaux industriels
Master instrumentation - électronique
Centre Universitaire El Wancharissi –Tissemsilt
2019/2020
1

Chapitre 1
Généralités sur les bus de terrain
2

•Définition d’un bus de terrain,
•Avantages et inconvénients,
•Historique : boucle de courant 4-20 mA,
•La normalisation des bus de terrain,
•- La pyramide CIM,
•-Les modèle OSI,
•TCP/IP
•les réseaux de terrains,
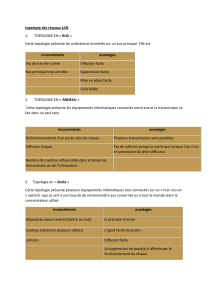
•Les différents réseaux de terrain (WorldFIP, INTERBUS, ASi, CAN,
LonWorks, Profibus, Ethernet, Autres réseaux de terrain)
Plan
3

Introduction
•Dans les environnements industriels d’aujourd’hui, la plus part des
tâches se font d’une façon automatique ce qui maximise les taux de
production, garantit une meilleure sécurité du personnel, et
augmente la rentabilité de l’industrie en générale.
•les réseaux de communication jouent un rôle important dans les
solutions automatisées.
4

Bus de Terrain
•TERRAIN :
un endroit, l’espace ou quelque chose de limité géographiquement
(atelier, usine, voiture,…)
•BUS (au sens informatique industrielle) :
conducteur ou ensemble de conducteurs communs àplusieurs circuits
permettant l’échange de données entre eux
•RESEAU :
ensemble de lignes de communication permettant l’échange de données
(informations) entre les différents systèmes éloignés,
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%