See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/230813268
Commande par Mode Glissant d’un Système Éolien à Base d’une Génératrice
Asynchrone à Double Alimentation
Conference Paper · April 2012
DOI: 10.13140/2.1.2463.2325
CITATIONS
3
READS
2,662
4 authors, including:
Ardjoun Sid Ahmed El Mehdi
University of Sidi-Bel-Abbes
10 PUBLICATIONS99 CITATIONS
SEE PROFILE
All content following this page was uploaded by Ardjoun Sid Ahmed El Mehdi on 01 June 2014.
The user has requested enhancement of the downloaded file.

ICRE’2012 – 15/16 avril 2012 - Université A. Mira - Bejaia
Commande par Mode Glissant d’un Système
Eolien à Base d’une Génératrice Asynchrone
à Double Alimentation
Sid Ahmed El Mahdi ARDJOUN, Mohamed ABID, Abdelghani AISSAOUI, Abdellatif NACERI
Laboratoire IRECOM, Département d’électrotechnique Université Djillali Liabes de Sidi Bel-Abbes,
Algérie.
Email: ardjo[email protected]om ……….
Résumé
—
Dans ce travail, nous proposons la commande
vectorielle directe en utilisant le contrôle par mode glissant
(CMG) pour la génératrice asynchrone à double
alimentation (GADA), appliquée dans le système de
conversion de l'énergie éolienne. Les puissances actives et
réactives qui sont générées par la GADA seront découplées
par l'orientation du flux statorique et commandées par des
contrôleurs par mode glissant qu’on a développés. Les
résultats obtenus montrent l'intérêt d'un tel contrôle dans ce
système.
Mots-clés: génératrice asynchrone à double alimentation,
commande vectorielle, commande par mode glissant,
commande des puissances.
NOMENCLATURE
GADA Génératrice Asynchrone à Double
Alimentation
ρ
Densité de l’air
S Surface de la turbine
v Vitesse du vent
C
P
Coefficient d’extraction de puissance
s(r) Indice du stator (rotor)
d, q Indices du référentiel de Park
V(I) Tension (courant)
P(Q) Puissance active (réactive)
φ Flux magnétique
Г
em
(Г
r
) Couple électromagnétique (mécanique)
R Résistance
L(M) Inductance (mutuelle)
σ Coefficient de fuites, σ = 1 – M
2
/LsLr
θ
r
(θ
s
) Position du rotor (stator)
ω
r
(ω
s
)
Ω Vitesse électrique rotorique (statorique)
Vitesse mécanique
g Glissement
f Frottement
J Inertie
P Nombre de paires de pôles
I. I
NTRODUCTION
Ces dernières années, il y a eu une évolution de la
production d'électricité basée sur l'énergie éolienne. Cette
source d'énergie s'est développée compte tenu surtout de la
diversité des zones exploitables et le coût relativement
intéressant [1].
Actuellement la plupart des éoliennes sont équipées
d'une GADA, ceci est due à plusieurs avantages: la
génération à vitesse variable (± 30% autour de la vitesse
du synchronisme), le contrôle découplé des puissances
actives et réactives, la réduction des contraintes
mécaniques et le bruit acoustique, l'amélioration de la
qualité de puissance et le faible coût [1].
Mais la GADA est soumis à beaucoup de contraintes,
telles que les effets des incertitudes paramétriques (due à
l’échauffement, saturation.....) et la perturbation de la
variation de vitesse, qui pourraient détourner le système à
partir de son fonctionnement optimal. C'est pourquoi le
contrôle devrait se préoccuper de la robustesse et de la
performance [2]. Pour ce faire, nous nous sommes référés
à l'utilisation de la commande par mode glissant.
Dans cet article, nous décrivons d'abord le système de
conversion d'énergie éolienne. Deuxièmement, le modèle
et la commande vectoriel de la GADA sont étudiés. Puis,
un CMG de la GADA est développé et testé. Enfin, nous
donnons quelques observations comparant l'utilisation de
CMG avec PI.
II.
DESCRIPTION D
'
UN SYSTEME DE CONVERSION
D
’
ENERGIE EOLIENNE
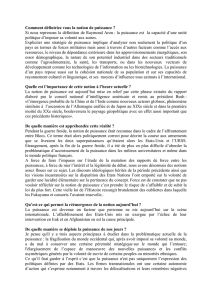
Le système de conversion éolienne, qui est représenté
sur la figure 1, se compose de: une turbine, un
multiplicateur, une GADA et un convertisseur.
Fig. 1. Schéma d’une chaîne de conversion d’énergie éolienne.
La turbine transforme l’énergie cinétique du vent en
énergie mécanique et la puissance cinétique totale
disponible sur la turbine d’une éolienne est donnée par
3
ρSv
2
1
P=
(1)
Cependant, seule une partie de l’énergie disponible
peut être captée par l’éolienne [3]
Réseau
GADA
Convertisseur
multiplicateur
Turbine
Vent

ICRE’2012 – 15/16 avril 2012 - Université A. Mira - Bejaia
3
Sv
p
ρC
2
1
P=
(2)
Pour les éoliennes, le coefficient d’extraction
d’énergie Cp qui dépend à la fois de la vitesse du vent et
de la vitesse de rotation de la turbine est généralement
défini dans l’intervalle 0.35- 0.59 [4].
Ainsi, la GADA transforme cette dernière en énergie
électrique. Les convertisseurs sont utilisés pour transférer
l'énergie maximale délivrée par l'éolienne au réseau en
fonction de la vitesse du vent.
III.
MODELISATION ET COMMANDE VECTORIELLE DE LA
GADA
La modélisation de la GADA est décrite dans le
référentiel de Park. Le système d’équation suivant décrit
la modélisation globale de la génératrice.
dr
r
.
θ
dt
qr
d
qr
I
r
R
qr
V
qr
r
.
θ
dt
dr
d
dr
I
r
R
dr
V
ds
s
.
θ
dt
qs
d
qs
I
s
R
qs
V
qs
s
.
θ
dt
ds
d
ds
I
s
R
ds
V
ϕ+
ϕ
+=
ϕ−
ϕ
+=
ϕ+
ϕ
+=
ϕ−
ϕ
+=
(3)
qs
MI
qr
I
r
L
qr
ds
MI
dr
I
r
L
dr
qr
MI
qs
I
s
L
qs
dr
MI
ds
I
s
L
ds
+=ϕ
+=ϕ
+=ϕ
+=ϕ
(4)
dt
d
Ω
Jf
Ω
r
Γ
em
Γ
++= (5)
Le couple électromagnétique s’exprime aussi en
fonction des courants et des flux par:
)( dr
I
qsqr
I
ds
s
L
M
p
em
Γϕ−ϕ=
(6)
Pour pouvoir contrôler facilement la production
d’électricité de l’éolienne, nous allons réaliser un contrôle
indépendant des puissances actives et réactives en
établissant les équations qui lient les valeurs des tensions
rotoriques, générées par un onduleur, aux puissances
actives et réactives statoriques [5-6].
Pour des raisons évidentes de simplifications, un
référentiel d-q lié au champ tournant et un flux statorique
aligné sur l’axe d ont été adoptés. En conséquence:
s
ds
ϕ=ϕ
et 0=ϕqs (7)
L’équation (4) des flux devient :
qr
MI
qs
I
s
L
dr
MI
ds
I
s
L
ds +=
+=ϕ
0 (8)
Si on suppose que le réseau électrique est stable, cela
conduis à un flux statorique φ
s
constant. De plus, la
résistance statorique peut être négligée étant donné que
c’est une hypothèse réaliste pour les génératrices utilisées
dans l’éolienne. Partant de ces considérations, on obtient :
0
=
ds
V, s
V
qs
V=et
ω
=ϕ
s
Vs
s
(9)
A l’aide de l’équation (8), on peut établir le lien entre
les courants statoriques et rotoriques :
qr
I
Ls
M
qs
I
Ls
s
dr
I
Ls
M
ds
I
−=
ϕ
+−=
(10)
Dans le repère diphasé, les puissances actives et
réactives statoriques d'une GADA s'écrivent :
qs
I
qs
V
ds
I
ds
V
s
P+=
(11)
qs
I
ds
V
ds
I
qs
V
s
Q+=
(12)
L'adaptation de ces équations aux hypothèses
simplificatrices donne
qr
I
s
L
M
s
V
s
P−=
(13)
s
ω
s
L
2
s
V
dr
I
s
L
M
s
V
s
Q+−=
(14)
Pour le contrôle de la génératrice, des expressions sont
établies montrant la relation entre les courants et les
tensions rotoriques qui lui seront appliquées.
qrs
s
r
dr
s
rdrrdr
I)
L
M
L(g
dt
dI
)
L
M
L(IRV
ω
22
−−−+= (15)
s
s
drs
s
r
qr
s
rqrrqr
L
MV
gI)
L
M
L(g
dt
dI
)
L
M
L(IRV +−+−+=
ω
22 (16)
Il est à remarquer que les puissances et les tensions
sont liées par une fonction de transfert du premier ordre.
Du fait de la faible valeur du glissement, il est possible
d’établir une commande vectorielle, car les influences des
couplages resteront faibles et les axes d et q pourront être
commandés séparément avec leurs propres régulateurs.
La méthode utilisée dans le contrôle de puissance
consiste à négliger les termes de couplage et à mettre en
place un régulateur indépendant sur chaque axe, afin de
contrôler les puissances active et réactive de manière
indépendante. Cette méthode est appelée la méthode
directe parce que les régulateurs de puissance contrôlent
directement les tensions rotoriques.
IV.
COMMANDE PAR MODE GLISSANT
La commande par mode glissant a connu un grand
succès ces dernières années. Cela est dû à la simplicité de
sa mise en œuvre et la robustesse par rapport aux
incertitudes du système et des perturbations externes
entachant le processus.

ICRE’2012 – 15/16 avril 2012 - Université A. Mira - Bejaia
L'idée de base de la commande par mode glissant est
premièrement d'attirer les états du système dans une
région convenablement sélectionnée, puis de concevoir
une loi de commande qui maintiendra toujours le système
dans cette région [7]. En résumé, une commande par mode
glissant est divisée en trois parties:
A. Choix de la surface de commutation
Pour un système non-linéaire présenté sous la forme
suivante :
ℜ∈ℜ∈ +=
u,
n
X
t)u(X,t)g(X,t)f(X,X
&
(17)
Où f (X, t), g(X, t) sont deux fonctions non linéaires
continues et incertaines supposées bornées.
On prend la forme d’équation générale proposée par
J.J.Slotine pour déterminer la surface de glissement
donnée par [8]:
X
d
Xe
e
1n
λ
dt
d
S(X)
−=
−
+=
(18)
Avec
[
]
T
1n
x,...,xx,X −
=&
,
T
,....
d
x,
d
x,
d
x
d
X
=&&&&
et
e : erreur sur la grandeur à régler -
λ
: coefficient positif -
n: ordre du système - X
d
: grandeur désirée - X : variable
d’état de la grandeur commandée.
B. Condition de convergence
La condition de convergence est définie par l’équation
de Lyapunov [9], elle rend la surface attractive et
invariante
0≤)X(S)X(S &
(19)
C. Calcul de commande
L’algorithme de commande est défini par la relation
neq
uuu +=
(20)
Avec : u: grandeur de commande, u
eq
: grandeur de
commande équivalente,
u
n
: terme de commutation de
commande, sat(S(X)/φ
: fonction de saturation, φ
: largeur
du seuil de la fonction saturation.
)sat(S(X)/φ
max
u
n
u=
(21)
<
>
=φsifφs
φsifsign(s)
)sat(S(X)/φ (22)
V.
C
ONTROLE DE LA PUISSANCE ACTIVE
Pour contrôler la puissance on prend n=1, l’expression
de la surface de contrôle de la puissance active a pour
forme :
)
s
P
ref s
(PS(P) −= (23)
La dérivée de la surface est :
)
s
P
ref s
P((P)S
&&
&
−= (24)
On remplace l’expression de la puissance (équation
(13))
)
qr
I
s
L
M
s
V
ref s
P((P)S &&
&+=
(25)
On tire l’expression du courant
qr
.
I
de l’équation de
la tension
qr
V
(équation (16)) en négligeant les termes de
couplage
)
qr
I
r
R
qr
(V
σ
r
L
s
L
M
s
V
ref s
P((P)S
−+= &
&
(26)
En remplaçant l’expression de
qr
V
par
n
qr
V
eq
qr
V+
,
la
commande apparaît clairement dans l’équation suivante :
)
qr
I
r
R)
n
qr
V
eq
qr
((V
σ
r
L
s
L
M
s
V
ref s
P((P)S −++= &
&
(27)
Durant le mode de glissement et en régime permanent,
on a :
0
n
qr
V0,(P)S0,S(P) === &
(28)
On tire de l’équation précédente la grandeur de
commande équivalente
eq
qr
V
qui s’écrit :
qrr
s
rs
sref
eq
qr
IR
MV LL
PV +
σ
−= &
(29)
Durant le mode de convergence, pour que la condition
0)()( ≤PSPS
&
soit vérifiée, on pose:
n
qr
V
r
L
s
σLM
s
V(P)S −=
&
(30)
Par conséquent, le terme de commutation est donné
par :
sat(S(P))
qr
KV
n
qr
V=
(31)
Pour vérifier la condition de stabilité du système, le
paramètre
qr
KV
doit être positif.
Afin d’atténuer tout dépassement possible de la
tension de référence
qr
V
, Il est souvent utile de rajouter
un limiteur de tension qui s’exprime par :
sat(P)
max
qr
V
lim
qr
V=
(32)
VI. C
ONTROLE DE LA PUISSANCE REACTIVE
Pour contrôler la puissance on prend n=1, l’expression
de la surface de contrôle de la puissance réactive a pour
forme :
)
s
Q
ref s
(Q)
s
S(Q −=
(33)
La dérivée de la surface est :
)
s
Q
ref
Q((Q)S &&& −=
(34)
On remplace l’expression de la puissance (équation
(14))

ICRE’2012 – 15/16 avril 2012 - Université A. Mira - Bejaia
)
dr
I
s
L
M
s
V(
ref s
Q((Q)S &
&& −−=
(35)
On tire l’expression du courant
dr
.
I
de l’équation de
la tension
dr
V
(équation (15)) en négligeant les termes de
couplage
)
dr
I
r
R
dr
(V
σ
r
L
s
L
M
s
V
ref s
Q((Q)S −+= &&
(36)
En remplaçant l’expression de
dr
V
par
n
dr
V
eq
dr
V+
, la
commande apparaît clairement dans l’équation suivante.
)
dr
I
r
R)
n
dr
V
eq
dr
((V
σ
r
L
s
L
M
s
V
ref s
Q((Q)S −++= &&
(37)
Durant le mode de glissement et en régime permanent,
on a : 0
n
dr
V0,(Q)S0,S(Q) === & (38)
On tire de l’équation précédente la grandeur de
commande équivalente
eq
dr
V
qui s’écrit :
dr
I
r
R
M
s
Vr
L
s
σL
ref s
Q
eq
dr
V+−= &
(39)
Durant le mode de convergence, pour que la condition
0(Q)SS(Q) ≤
&
soit vérifiée, on pose :
n
dr
V
r
L
s
σ
L
M
s
V)Q(S −=
&
(40)
Par conséquent, le terme de commutation est donné
par :
sat(S(Q))
dr
KV
n
dr
V=
(41)
Pour vérifier la condition de stabilité du système, le
paramètre
dr
KV
doit être positif.
Afin d’atténuer tout dépassement possible de la
tension de référence
dr
V
, Il est souvent utile de rajouter
un limiteur de tension qui s’exprime par :
sat(Q)
max
dr
V
lim
dr
V=
(42)
VII. R
ESULTATS OBTENUS
Afin de montrer les performances de la commande
par mode glissant proposée et appliqué a une GADA, nous
avons fait une série de tests (suivi de consignes, variation
de la vitesse de la GADA et variations paramétriques) :
Le premier test consiste à réaliser des échelons de
puissance active, réactive et de vitesse. Conditions du test:
- à t=0.5 s : échelon de puissance active (
ref s
P
passe de 0 à –5000W)
- à t=1 s : échelon de puissance réactive (
ref s
Q
passe de 0 à 2000 VAR).
- à t=1.5 s : échelon de vitesse passe de 1450à
1350 tr/min.
Ce test nous permet de vérifier dans quelle mesure les
puissances mesurées restent à leur valeur de consigne
lorsque les puissances et la vitesse de rotation de la
machine varient brusquement.
Le deuxième test consiste à faire varier les paramètres
du modèle de la GADA utilisé (test de robustesse) avec le
maintient des conditions du premier test. La résistance
augmente de 50%, et les inductances diminuent de 30%.
La fig.2 montre un schéma fonctionnel du système
étudié. La fig.3 et la fig.4 montrent la réponse du système
avec un régulateur classique PI et par mode glissant
respectivement sans variations paramétriques. La fig.5 et
la fig.6 montrent la réponse du système avec un régulateur
classique PI et par mode glissant respectivement avec
variations paramétriques.
Les paramètres de la GADA sont:
n
P
=20kW,
p
=2,
s
R
= 0.455 Ω,
s
L
= 0.07 H,
r
R
= 0.19 Ω,
r
L
= 0.0213
H,
M
= 0.034 H,
f
= 0.0024,
J
= 0.53 kg.m
2
Fig. 2. Schéma fonctionnel du système étudié
Les résultats obtenu montrent clairement que:
En utilisant la régulation par le PI classique, on
observe l’effet du couplage entre les deux puissances car
un échelon imposé à l’une des deux puissances (active ou
réactive) induit un rejet important des puissances par
rapport à la valeur de référence et un temps de retour à
l’état initial. Ainsi, la variation de la vitesse de la GADA
influe sur les deux puissances en observant un autre rejet.
De plus, lors des variations paramétriques, il y a une
augmentation de l’amplitude des rejets et le temps de
retour.
Par contre, la régulation par mode glissant montre sa
supériorité en rejetant efficacement les effets des
perturbations, d’où les puissances suivent leurs références
parfaitement.
s
P
s
P
s
P
s
Q
s
P
ref
s
Q
s
P
ref
s
P
qr
V
dr
V
Régulateur
des
puissances
Réseau
GADA
Ω
Re
dresseur
Onduleur à
MLI
dq
abc
Calcule
des
puissances
 6
7
6
7
1
/
7
100%