CHAPTER 13
DYNAMIC BALANCING OF ROTORS
Till last chapter, we concentrated on transverse and torsional vibration analyses of rotor-bearing
systems, e.g., free vibrations, forced responses and instability analysis. These analyses are very much
useful tool for designers of rotating machineries to predict the behaviour of such machineries before
actually their manufacturing and commissioning. These analyses help in the modification of design if
operating speed is close to critical speeds or in the instability zones. In the present and subsequent
chapters, we will address another class of practical and the most common problems related to rotating
machineries that practicing engineers face during the commissioning of new rotating machine, during
operation, or after every major overhaul of such machineries. Some of these fault are unbalances,
misalignments, rotor-stator rubs, bent or bowed shafts, fatigue cracks, the wear and tear of various
moving and stationary components, loose components, and faults related to components of bearings,
gears, coupling, blades, seals, etc. Among various faults, the most common fault is inherent
unbalances (or residual unbalances) in machineries occur due to manufacturing error (fits and
tolerances), material in-homogeneity, improper commissioning, thermal deformation, during
operation due to the wear and tear, residual stresses, and so on. Basic definition of the unbalance and
its type for rigid rotors has been introduced earlier in Chapter 2. To prevent vibration we must first
decrease this unbalance (or to balance the rotor), which is the major source of vibration.
In the present chapter, the procedure of static and dynamic balancing of rotor will be discussed in
great details. For dynamic balancing, rotors are classified in two major categories, e.g., the rigid and
flexible rotors. In fact, the same shaft of a rotor can be considered as rigid if it is operating much
below its first critical speed and the flexible when it is operating near or above the first critical speed.
That is why sometime it is also called the slow and high speed rotor balancing. Basic principles of
rigid and flexible rotor balancing are quite different. Necessary principles and theories for dynamic
balancing will be outlined before describing practical methods of balancing. For rigid rotor balancing
two methods are described, e.g., the conversional cradle balancing machine method (off-site or off-
field balancing) and the modern influence coefficients method (on-site or field balancing). Similarly,
for the flexible rotor two basic methods are available, e.g., the modal balancing method and the
influence coefficient method. In general, the rigid rotor can be balanced by putting correction masses
in two balancing planes, however, in flexible rotor case it can be balanced by N balancing planes,
where N is the number of flexible modes need to be balanced. Some time it is suggested to balance
flexible rotor by (N+2) balancing planes (i.e., to balance rigid rotor modes by 2 planes at low speeds
and flexible rotor modes by N planes at high speeds).

767
The unbalance in rotors will not only cause rotor vibrations, but also transmit rotating forces to the
bearings and to the foundation structure. The force thus transmitted may cause damage to the machine
parts and its foundation. If the transmitted force is large enough, it might affect even the neighbouring
machines and structures. Thus, it is necessary to remove the unbalance of a rotor, to as large an extend
as possible, for its smooth running. The residual unbalance estimation in rotor-bearing system is an
age-old problem. From the state of the art of the unbalance estimation, the unbalance can be obtained
with fairly good accuracy (Kellenburger, 1972; Drechsler, 1980; Gnilka, 1983; Krodkiewski et al.,
1994;
Darlow, 1989
). Now the trend in the unbalance estimation is to reduce the number of test runs
required, especially for the application of large turbogenerators where the downtime is very expensive
(
Edwards et al., 2000;
Tiwari, 2005 ).
13.1 Unbalances in the Rigid and Flexible Rotors
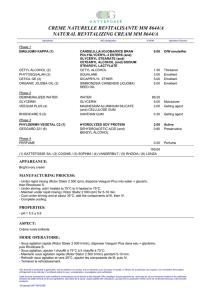
Unbalance in a Single Plane: Such unbalance occurs in gear wheels, grinding wheels, single stage
compressor, propeller of aircraft engines, etc. Figure 13.1 shows a rigid thin disc with the single plane
unbalance. O is the centre of rotation of the disc and G is the centre of gravity of the rotor. The
eccentricity, e, is defined a distance between the centre of rotation and the centre of gravity. The
unbalance in the disc is defined as
meU
=
(13.1)
where
U
is the unbalance with a unit of kg-m or g-mm, m is mass of disc, e is the eccentricity in the
disc (length OG in Fig. 13.1).
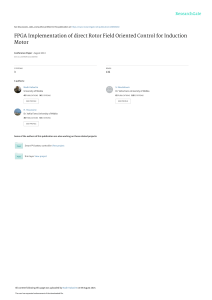
Unbalances in Two or More Planes:
Figure 13.2 shows two types of unbalance in a rigid rotor system. The rotor consists of a rigid rotor
and a massless elastic shaft. First (Fig. 13.2a) is the static unbalance, which is the state represented by
a geometric eccentricity e of the center of a gravity of a rotor from the centerline of the shaft. The
unbalance produces a centrifugal force proportional to the square of the rotational speed. This static
unbalance can be detected without operating the rotor since the unbalance is always directed
G
Ox
y
m
Figure 13.1 A unbalance in a single plane

768
downward if the shaft is supported horizontally by bearings having little friction. Theoretically, it is
similar to the single plane unbalance described above, except the unbalance in uniformly distributed
along the length of the rigid rotor. Second type of unbalance is couple unbalance, which is the state
represented by the angular misalignment of the principal axis of moment of inertia of the rotor with
respect to the centerline of the shaft. The magnitude of the couple unbalance (
(
)
2 2
d p
M I I F rl
ω φ ω
= − =
) is determined by the angle
φ
as shown in Figure 13.2b. This type of
unbalance cannot be detected without rotating the shaft. Figure 13.2(a and b) shows these unbalances
as models with one and two concentrated masses, respectively. That means static unbalance can be
balanced by a single plane balancing and couple unbalance has to balance with two balancing planes.
With the above definition now the
dynamic unbalance
in a rigid rotor means the state with the both
static and couple unbalances. (i.e., combination of Figures 13.2a and b). However, for such a case also
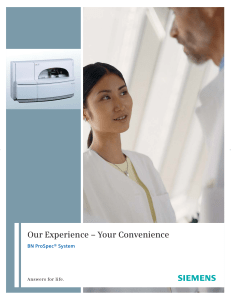
two-plane balancing will be enough. On the other extreme case would be the unbalances in a
continuous rotor (i.e., a flexible rotor with distributed mass) as shown in Figure 13.3. Here we require
N
plane balancing, where
N
≥
2
and generally for balancing up to
m
th
mode
N
=
m
for
m
≥
2
.
(a) Static unbalance (b) Couple unbalance
Figure 13.2 Unbalances in a long rigid rotor system
Figure 13.3 Variation of the unbalance in a continuous flexible rotor

769
13.2 Principle of Rigid Rotor Balancing
Now some basic principle of rigid rotor balancing will be outlined and this will pay the way to
understand balancing methods for practical rotors.
13.2.1 Static Balancing (Single plane balancing):
The unbalance force, for a single plane disc as shown in Fig. 13.1, is given as
2
F m e
ω
=
(13.2)
where
ω
is the spin speed of the rotor. If we want to know correction mass,
m
c
, at a radius of
r
, it will
be given by
/
c
e r
m
m
=
(13.3)
The correction should be placed 180
0
away from unbalance mass
m
. Such a correction is called
a
single plane balancing
of the rotor, which eliminates the inertia forces transmitted to the foundation
(or bearing).
13.2.1 Static Balancing (Two plane balancing):
We represent eccentricities and centrifugal forces as vectors, for which both magnitude and direction
are necessary.
(a) Actual system (b) Equivalent force model
Figure 13.4 Elimination of the static unbalance
Balancing is attained if the centrifugal force
F me
ω
=
2
is cancelled by the other centrifugal forces,
due to balancing weights
m
1
and
m
2
. In practical machines, the positions of the correction planes are
determined from the shape of the rotor. Balancing is done by removing parts of the rotor or by
attaching correction masses in plane I and II. In practice, removing some part is done by drilling,
milling or grinding. Addition of weight would require the use of wire solders, bolted or riveted
washers and welded weights. Let the masses
m
1
and
m
2
are attached to the surface at radii
a
1
and

770
a
2
, respectively. To cancel the unbalance force
F me
ω
=
2
by centrifugal force
I
F m a
ω
=
2
1 1
and
II
F m a
ω
=
2
2 2
, the following relationship must hold
I II
F F F
+ =
and
I II
F l F l
=
1 2
(13.4)
where
l
1
and
l
2
are shown in Figure 13.4. Equation (13.4) can be solved as
21
2
ll
Fl
F
I
+
=
and
21
1
ll
Fl
F
II
+
=
(13.5)
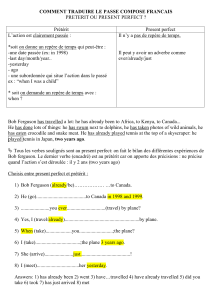
13.4.2 Couple unbalance
Figure 13.5 Couple unbalance
The moment
(
)
d p
M I I
ω φ
= −
2
due to couple unbalance can be replaced equivalently by a couple of
forces
P M d
=
, which is separated by the distance
d
. We add correction masses
1
m
and
2
m
to
cancel moment
M
by the centrifugal forces
I
P m a
ω
=
2
1 1
and
II
P m a
ω
=
2
2 2
(Fig. 13.5). For this case
the following relationships must hold
I II
P l P l M
+ =
1 2
and
I II
P P
=
(13.6)
The latter is the condition to prevent a new static unbalance due to the addition of
m
1
and
m
2
.
Vectorially they should be
P P
= −
1 2
. Equation (13.6) gives
I II
M
P P
l l
= =
+
1 2
(13.7)
It is assumed here that we know the plane of couple unbalancing.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%