Démarrage des moteurs asynchrones triphasés : Projet de fin de cycle
Telechargé par
abdou baouche

[Tapez
u
R
é
Mi
n
u
n texte]
é
publi
q
n
istèred
e
Caracté
q
ueAl
g
e
l'Ensei
g
_____
_
U
niv
D
é
P
E
S
ristique
s
M
E
T
u
g
érien
n
g
nement
S
_
__________
_
ersité Dr
F
acul
t
é
partem
e
P
rojet
d
E
n vue de l
’
Li
c
S
pécialité
Filière:
s
et dis
p
async
h
P
BAOUC
H
S
B
M
OHAM
M
D
E
xaminate
u
u
teur
:
Sout
e
Prom
n
eDém
S
upérieu
r
_
_________
_
.
T
ahar
M
t
é de
T
e
c
e
nt d’
E
le
c
d
eFin
’
obtention
c
ence(
L
:ELECTR
O
ELECTRO
T
Intitulé
p
ositifs d
h
rones t
r
P
résenté p
H
EAbde
l
B
AAOus
s
M
EDIAb
d
D
evant le j
u
u
r:Mr.Y
O
Mr.
B
e
nu le :
/
otion : 2
0
ocrati
q
r
etdela
_
____
_
_
___
_
M
oulay
d
c
hnologie
c
trotech
n
deCy
du diplôm
e
L
MD)
O
TECHNI
Q
T
ECHNIQ
U
:
e déma
r
r
iphasé
s
ar :
l
moume
n
s
ama
d
errahm
a
u
ry :
O
UCEFAb
d
ENYAHIA
/
11/2020
0
19-2020
q
ueet
Recherc
h
__
d
e
S
aïda
n
ique
cle
e
de
Q
UE
U
E
r
ra
g
e de
s
s
n
e
a
ne
d
elaziz
Mokhtar
Popul
a
h
eScient
i
s
moteu
a
ire
i
fique
rs

Remerciements
Au terme de ce travail, nous remerciement tout d’abord ALLAH qui
nous a donné la force et le courage pour terminer nos études et
élaborer ce modeste travail.
Nous tenons à remercier toutes les personnes sans les quelles ces
années d’étude n’auraient été que le pâle reflet de celles
que nous avons passées.
Nos sincères remerciements à notre encadreur M.BENYAHIA Mokhtar
qui a bien accepté de nous encadrer et de nous avoir encouragés le
long de notre travail, aussi pour toute la documentation qu’il a mis à
notre disposition.
Nous adressons aussi noss remerciements aux membres de jury pour
avoir accepté d’examiner et juger ce travail.

Table des matières
i
Introductiongénérale ......................................................................................................... 2
Chapitre1:GénéralitéssurledémarragedesmachinesàC.Atriphasées
1.1 Introduction ............................................................................................................................. 4
1.2 Description de la machine synchrone ....................................................................................... 4
1.2.1 Constitution ...................................................................................................................... 4
1.2.1.1 Stator (inducteur) ....................................................................................................... 6
1.2.1.2 Rotor (induit) ............................................................................................................. 6
1.2.2 Fonctionnement en moteur ................................................................................................ 7
1.2.3 Problème de démarrage ..................................................................................................... 7
1.3 Description de la machine Asynchrone ..................................................................................... 8
1.3.1 Constitution ....................................................................................................................... 8
1.3.1.1 Stator ........................................................................................................................... 8
1.3.1.2 Rotor............................................................................................................................ 9
1.3.1.3 Entrefer ........................................................................................................................ 9
1.4 Principe de fonctionnement des machines asynchrone ............................................................. 11
1.4.1 Glissement, couple et vitesse de rotation .......................................................................... 12
1.4.2 Puissance et rendement d’un moteur asynchrone triphasé ................................................ 13
1.4.2.1 La puissance ................................................................................................................ 13
1.4.2.2 Le rendement ............................................................................................................... 14
1.4.2.3 Bilan des puissances .................................................................................................... 15
1.5 Couplage des moteurs asynchrones triphasés ........................................................................... 15
1.6 Caractéristiques du moteur asynchrone ..................................................................................... 17

Table des matières
ii
1.6.1 Caractéristiques en charge ................................................................................................. 17
1.6.2 Principe de démarrage des moteurs asynchrones .............................................................. 18
1.6.2.1 Le choix d’un démarreur ............................................................................................. 21
1.6.2.2 Les différents types des systèmes de démarrage ......................................................... 22
1.7 Conclusion ................................................................................................................................. 22
Chapitre2:Caractéristiquesetdispositifsdedémarragedes
moteursasynchrones
2.1. Introduction ............................................................................................................................. 25
2.2. Constitution des installations .................................................................................................. 25
2.2.1. Circuit de commande ....................................................................................................... 25
2.2.2. Circuit de puissance ........................................................................................................ 26
2.3. Les appareils de commande, de signalisation et de protection ................................................. 26
2.3.1 Sectionneur ........................................................................................................................ 26
2.3.2. Fusible ............................................................................................................................. 27
2.3.3. Interrupteur sectionneur .................................................................................................. 27
2.3.4. Relais thermique .............................................................................................................. 28
2.3.5. Disjoncteur ...................................................................................................................... 28
2.3.6. Le contacteur .................................................................................................................. 29
2.3.7. Capteur de fin de course .................................................................................................. 29
2.3.8. Bloc auxiliaire temporisé ................................................................................................ 29
2.3.9. Bloc de contacts auxiliaires ............................................................................................. 30
2.4. Les problèmes de démarrage des moteurs asynchrone triphasés ............................................. 31
2.4.1. Problématique de démarrage ............................................................................................ 32
2.4.2. Solution générale au problème de démarrage ................................................................. 32

Table des matières
iii
2.5. Les types de démarrage ........................................................................................................... 34
2.5.1. Démarrage classique ........................................................................................................ 34
2.5.1.1. Démarrage direct pour un moteur asynchrone de faible puissance ........................... 34
2.5.1.2. Démarrage direct semi-automatique à deux sens de marche ..................................... 37
2.5.2. Action sur la tension d’alimentation au stator .................................................................. 38
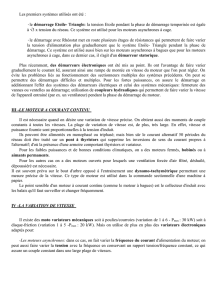
2.5.2.1. Démarrage Étoile-Triangle ......................................................................................... 39
2.5.2.2. Démarrage par résistances statoriques ...................................................................... 44
2.5.2.3. Démarrage par autotransformateur ........................................................................... 48
2.5.3. Démarrage à tension nominale (démarrage rotorique) ..................................................... 50
2.5.3.1. Démarrage par action sur les résistances rotoriques ................................................. 50
2.5.4. Démarrage électronique .................................................................................................. 54
2.5.4.1. Démarrage par gradateur (démarrage progressif) ...................................................... 54
2.5.4.2. Démarrage par variateur de vitesse (Convertisseur de fréquence) pour MAS ........... 56
2.5.5. Comparaison des divers procèdes de démarrage .............................................................. 58
2.6 Conclusion .......................................................................................................................... 59
ConclusionGénérale ................................................................................. 61
RéférencesBibliographiques .......................................................................................... 63
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
1
/
72
100%