Circuit équivalent machine asynchrone : cours de génie électrique
Telechargé par
kapirichard8

Circuit ´
equivalent de la machine asynchrone en r´
egime permanent
Handy Fortin Blanchette
D´
epartement de g´
enie ´
electrique
TABLE 1 – Modifications au document.
Date Modification
22/09/2011 Ajout de l’exercice 2
23/09/2011 Correction de l’´
equation (1.14) (L′
r)est remplac´
e par L′
R
23/09/2011 Correction de l’´
equation (1.14) (Ls)est remplac´
e par LS
23/09/2011 Correction de l’´
equation (1.15) (L′
lr )est remplac´
e par L′
R
13/10/2011 Correction de l’´
equation (1.7) ωeil manquait un carr´
e`
a ce terme ω2
e
04/09/2012 R´
evision du document. Nouveau formattage des pages.
08/09/2014 Correction du titre.
1.1 Mod`
ele en r´
egime permanent
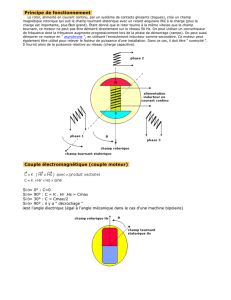
Le mod`
ele par phase de la machine asynchrone est obtenu `
a partir des ´
equations dynamiques.Le mod`
ele
´
equivalent est pr´
esent´
e`
a la figure 1.
Ce mod`
ele est obtenu en supposant les tensions au rotor nulles, ce qui s’applique aux machines `
a cage
d’´
ecureuil car les conducteurs rotoriques sont court-circuit´
es aux extr´
emit´
es par des bagues m´
etalliques
conductrices. Le courant efficace circulant dans la phase du mod`
ele ´
equivalent, identifi´
e par ˜
Ias sur la
figure 1, est calcul´
e`
a partir de l’imp´
edance. L’imp´
edance ´
equivalente (Z)pour une phase est donn´
ee par
la relation (1.1).
Z=
rsr′
r
s+ω2
e(L2
M−LSL′
R) + jωer′
r
sLS+rsL′
R
r′
r
s+jωeL′
R
(1.1)
o`
ursest l’imp´
edance statorique en (Ω), r′
rest la r´
esistance rotorique report´
ee au stator en (Ω), ωeest la
fr´
equence angulaire du r´
eseau en (rad/s), sest le glissement (en P.U.) et j=√−1. Le glissement sest
IGEE405/ELE4455 - Syst`
emes ´
electrom´
ecaniques 1

( )
r’r
L’lr
Lls
LM
Rp
Vas
RS
Ias
Branche de
magné!sa!on
Branche
rotorique
Branche
statorique
r’rs
1-s
Résistance
mécanique
FIGURE 1 – Mod`
ele ´
equivalent de la machine asynchrone pour une phase.
d´
efini comme suit :
s=ωe−ωr(e)
ωe
(1.2)
o`
uωr(e)est la vitesse angulaire ´
electrique du rotor. La vitesse angulaire ´
electrique du rotor est obtenue en
multipliant la vitesse angulaire m´
ecanique (ωr(mec)) par le nombre de paires de pˆ
oles de la machine (p).
(Notez :pminuscule pour le nombre de
paires
de pˆ
oles et Pmajuscule pour le nombre de pˆ
oles).
ωr(e)=pωr(mec)(1.3)
Les inductances LSet L′
Rsont d´
efinies comme suit :
LS=Lls +LM(1.4)
et
L′
R=L′
lr +LM(1.5)
o`
uLMrepr´
esente l’inductance de magn´
etisation, Lls est l’inductance de fuite du stator et L′
lr est
l’inductance de fuite du rotor report´
ee au stator. `
A partir de l’imp´
edance d´
efinie en (1.1), il est possible de
d´
eterminer le module du courant circulant dans la phase |˜
Ias|(A) en utilisant la relation (1.6)
|˜
Ias|=|˜
Vas|
|Z|(1.6)
o`
u|˜
Vas|est la tension de phase efficace appliqu´
ee `
a l’enroulement statorique. Le couple ´
electromagn´
etique
IGEE405/ELE4455 - Syst`
emes ´
electrom´
ecaniques 2

(Te) d´
evelopp´
e par la machine en fonction du courant est donn´
e par la relation (1.7)
Te=
3P
2ωeL2
Mr′
r
s|˜
Ias|2
r′
r
s2+ω2
eL′2
R
(1.7)
Le couple ´
electromagn´
etique peut ´
egalement ˆ
etre exprim´
e directement en fonction de la tension appliqu´
ee
`
a la phase par l’´
equation (1.8)
Te=3P
2ωeL2
Mr′
rs|˜
Vas|2
rsr′
r+sω2
e(L2
M−LSL′
R)2+ω2
e(r′
rLS+srsL′
R)2(1.8)
o`
u|˜
Vas|est le module de la tension appliqu´
ee `
a la phase (en Volts). En effectuant l’examen des expressions
(1.7) et (1.8), on observe que pour un glissement nul (s= 0), le couple d´
evelopp´
e est nul. Ceci s’explique
par le fait que lorsque le rotor tourne `
a la vitesse synchrone, le flux magn´
etique circulant dans les pˆ
oles
du rotor ne varie plus temporellement. Un flux invariant dans le temps ne produit pas de tension dans les
mailles form´
ees par les barres m´
etalliques du rotor et donc, il n’y a aucun courant r´
esultant. Puisque le
couple ´
electromagn´
etique est d´
eveloppp´
e par l’interraction des courants statoriques et rotoriques, le couple
est nul lorsque les courants rotoriques sont nuls.
D`
es que la vitesse du rotor diminue en bas de la vitesse synchrone, il y a induction de courants rotoriques
et un couple ´
electromagn´
etique apparaˆ
ıt `
a nouveau. L’augmentation de la charge sur l’arbre de la machine
a donc pour effet de r´
eduire la vitesse et ainsi, augmenter le couple. Toutefois, il y a une limite de charge
qu’il faut respecter. En effet, si l’arbre est trop charg´
e et que le glissement devient trop important, le rotor
se
d´
ecroche
du champ tournant. La valeur du couple `
a laquelle ce d´
ecrochage survient se nomme couple
de d´
ecrochage. Il est possible, en d´
erivant l’expression (1.7) par rapport `
aset en posant la d´
eriv´
ee ´
egale
`
a z´
ero de trouver la valeur du glissement `
a la valeur du couple de d´
ecrochage. Cette valeur not´
ee smest
donn´
e par la relation (1.9)
sm=r′
rG(1.9)
o`
u
G=±r1
ωe2r2
s+L2
S
p(L2
M−LSL′
R)2ω2
e+r2
sL′2
R
(1.10)
IGEE405/ELE4455 - Syst`
emes ´
electrom´
ecaniques 3

La provenance du signe ±provient du fait que la machine peut ˆ
etre op´
er´
e´
e en mode moteur ou g´
en´
erateur.
En mode moteur, pour une vitesse positive, le glissement est positif. En utilisant la valeur du glissement
lors du d´
ecrochage, il est possible de d´
eterminer la valeur du couple de d´
ecrochage. Le couple de
d´
ecrochage (Te(max)) est obtenu en substituant les relations (1.9) et (1.10) dans l’´
equation (1.8).
Te(max)=3P
2ωeL2
MG|˜
Vas|2
rs+Gω2
e(L2
M−LSL′
R)2+ω2
e(LS+GrsL′
R)2(1.11)
Le glisssement n’est pas seulement utile pour calculer le couple : il permet ´
egalement l’´
etude de la
fr´
equence des courants rotoriques. Tel que mentionn´
e pr´
ec´
edemment, lorsque le rotor tourne `
a la vitesse
synchrone, il n’y a plus d’induction dans les barres du rotor et donc, il n’y a plus de courants. La fr´
equence
des courants induits est alors ´
egale `
a z´
ero. `
A l’extrˆ
eme, si le rotor est bloqu´
e, il subit une fr´
equence
angulaire d’induction ´
egale `
a la fr´
equence angulaire du champ tournant (qui est `
a la fr´
equence angulaire
synchrone). Il existe donc une relation entre la fr´
equence des courants rotoriques et la vitesse de rotation
de la machine. Cette relation est exprim´
ee par :
ωir =sωe(1.12)
o`
uωir est la fr´
equence angulaire des courants induits dans les conducteurs du rotor.
1.2 Identification des param`
etres
L’identification des param`
etres du mod`
ele s’effectue `
a partir de trois mesures exp´
erimentales
1. La mesure en courant continu de la r´
esistance des enroulements statoriques
2. Le test `
a rotor bloqu´
e
3. Le test `
a la vitesse synchrone
1.2.1 R´
esistance des enroulements statoriques
La premi`
ere mesures consiste `
a appliquer une source `
a courant continu entre deux bornes statoriques afin
de mesurer la r´
esistance. Pour une tension Vdc et un courant idc, la r´
esistance statorique (rs) est donn´
ee
par :
rs=1
2
Vdc
idc
(1.13)
IGEE405/ELE4455 - Syst`
emes ´
electrom´
ecaniques 4

Le facteur 1/2de l’´
equation (1.13) provient du fait que g´
en´
eralement, un seul conducteur par phase est
disponible `
a l’ext´
erieur de la machine. Puisque la source de tension ne peut ˆ
etre appliqu´
ee qu’entre deux
phases, il faut diviser la r´
esistance par 2.
1.2.2 Test `
a rotor bloqu´
e
Le second test est le test `
a rotor bloqu´
e. Lorsque le rotor d’un moteur asynchrone est bloqu´
e (vitesse
m´
ecanique nulle), le glissement correspondant est ´
egal `
a 1. Dans ce cas, la branche comprenant
l’inductance de magn´
etisation LMet la r´
esistance associ´
ee aux pertes ferromagn´
etiques RPest en parall`
ele
avec l’inductance de fuite rotorique report´
ee au stator L′
lr et la r´
esistance rotorique report´
ee au stator r′
r.
L’imp´
edance de la branche rotorique ´
etant beaucoup plus faible que celle de magn´
etisation, l’impedance
´
equivalente du circuit peut ˆ
etre approxim´
ee en consid´
erant l’imp´
edance de la branche rotorique seulement.
En utilisant cette hypoth`
ese, on obtient le circuit ´
equivalent en rotor bloqu´
e illustr´
e`
a la figure 2.
r’r
s
L’lr
Lls
RS
Vas
Ias
FIGURE 2 – Mod`
ele ´
equivalent de la machine asynchrone en rotor bloqu´
e.
L’imp´
edance mesur´
ee en utilisant le circuit ´
equivalent de la figure 2 comporte quatre ´
el´
ements : la
r´
esistance statorique (rs), l’inductance de fuite statorique (Lls), l’inductance de fuite rotorique report´
ee
au stator (L′
lr ) et finalement, la r´
esistance rotorique report´
ee au stator (r′
r). Il est important de remarquer
que l’inductance de fuite totale qui sera mesur´
ee par ce test est la sommation de L′
lr et de Lls.`
A
priori, il n’existe pas de m´
ethode pour dissocier ces deux inductances. La proc´
edure de test standardis´
ee
d’identification des param`
etres des machines asynchrones (IEEE Std.112-1996) propose la table (2) qui
indique des rapports empiriques entre les deux inductances en fonction de la classe des moteurs. En
utilisant ces rapports, il est possible de dissocier les deux inductances.
1.2.3 Test `
a la vitesse synchrone
Le test `
a la vitesse synchrone vise l’identification de l’inductance statorique LSd´
efinie par l’´
equation
(1.4). Puisque la vitesse du rotor est ´
egale `
a la vitesse du champ tournant, le glissement est ´
egal `
a 0. Cette
IGEE405/ELE4455 - Syst`
emes ´
electrom´
ecaniques 5
 6
7
6
7
1
/
7
100%